|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <ocroadbasedprediction.h>
Classes | |
| struct | SearchState |
Public Member Functions | |
| void | setAngleErrorMax (double value) |
| void | setTMaxUTC (double value) |
| void | setLatPrecision (double value) |
| void | setLatError (double value) |
| void | setLonError (double value) |
| void | setVMax (double value) |
| void | setAMax (double value) |
| void | setAMin (double value) |
| void | setTimeHeadway (double value) |
| void | setTimeLeeway (double value) |
| void | setDelay (double value) |
| void | setLaneWidthPredictions (bool value) |
| void | setLateralPredictions (bool value) |
| void | setWidthUB (double value) |
| void | setWidthLB (double value) |
| OCRoadBasedPrediction (adore::env::traffic::TrafficMap *trafficMap) | |
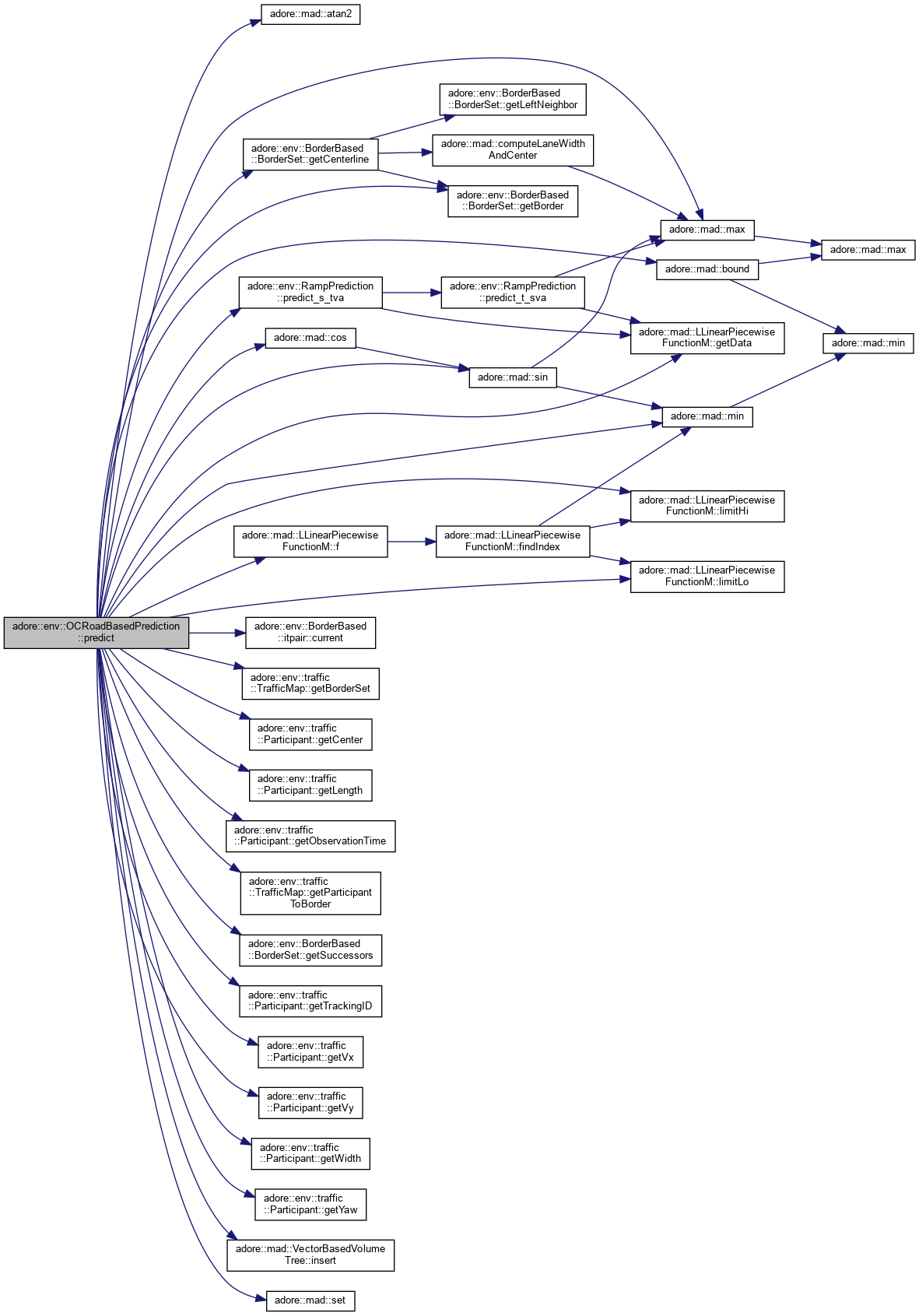
| virtual bool | predict (const traffic::Participant &p, OccupancyCylinderPredictionSet &set) const override |
| void | setAngleErrorMax (double value) |
| void | setTMaxUTC (double value) |
| void | setLatPrecision (double value) |
| void | setLatError (double value) |
| void | setLonError (double value) |
| void | setVMax (double value) |
| void | setAMax (double value) |
| void | setAMin (double value) |
| void | setTimeHeadway (double value) |
| void | setTimeLeeway (double value) |
| OCRoadBasedPrediction (adore::env::traffic::TrafficMap *trafficMap) | |
| virtual bool | predict (const traffic::Participant &p, OccupancyCylinderPredictionSet &set) const override |
Private Attributes | |
| double | t_max_utc_ |
| double | lat_precision_ |
| double | lat_error_ |
| double | lon_error_ |
| double | v_max_ |
| double | a_max_ |
| double | a_min_ |
| double | angle_error_max_ |
| double | time_headway_ |
| double | time_leeway_ |
| double | delay_ |
| bool | lane_width_predictions_ |
| bool | lateral_predictions_ |
| double | width_ub_ |
| double | width_lb_ |
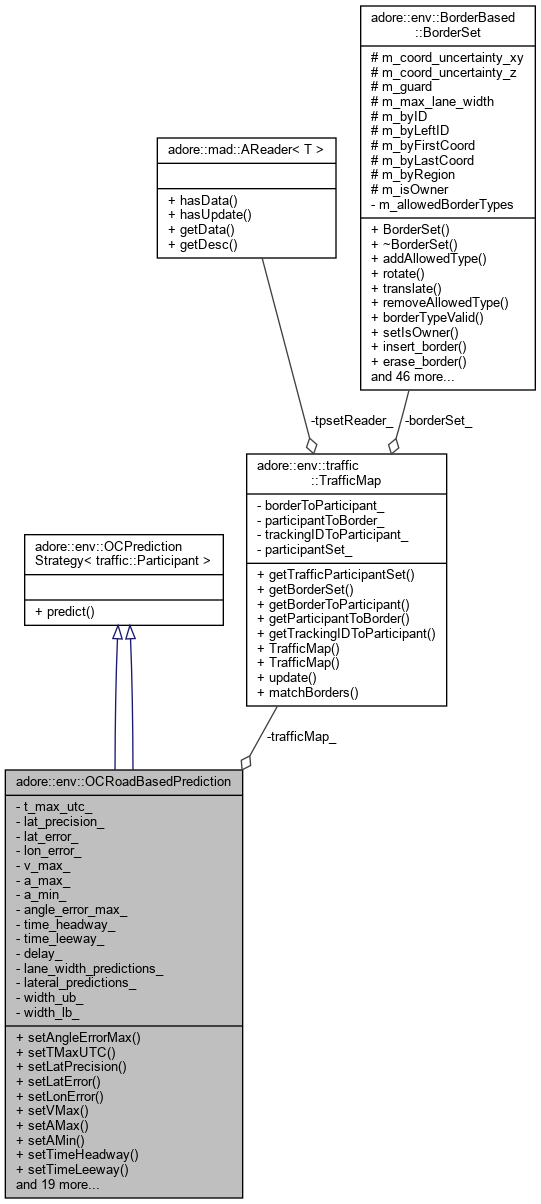
| adore::env::traffic::TrafficMap * | trafficMap_ |
A prediction along a given road-graph. Challenges:
|
inline |
|
inline |
|
inlineoverridevirtual |
formulate one or more predictions for Participant p as an OccupancyCylinderTree (a set of cylinders in xyz and t)
| p | the participant state information |
| set | the resulting occupancy prediction is placed in set |
Implements adore::env::OCPredictionStrategy< traffic::Participant >.

|
inlineoverridevirtual |
formulate one or more predictions for Participant p as an OccupancyCylinderTree (a set of cylinders in xyz and t)
| p | the participant state information |
| set | the resulting occupancy prediction is placed in set |
Implements adore::env::OCPredictionStrategy< traffic::Participant >.
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |

|
inline |

|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |

|
inline |

|
private |
maximum acceleration. set a_max_=a_min_ to get no divergence.
|
private |
minimum acceleration. set a_max_=a_min_ to get no divergence.
|
private |
maximum angle error, which is permitted to associate with a border
|
private |
delay after which acceleration is applied
|
private |
select whether to predict motion of objects up to lane border or only the width of objects relative to lane center
|
private |
|
private |
maximum lateral overapproximation of the vehicle body
|
private |
select whether to predict radius based on lateral motion up to lane width
|
private |
initial (and constant) (measurement) error to the side of the vehicle
|
private |
time at which the prediction ends. (prediciton starts at time stamp of object.)
|
private |
arriving earlier than expected
|
private |
leaving later than expected
|
private |
a data object, which allows to map between borders and traffic participants
|
private |
initial (measurement) error in movement direction of the vehicle maximum speed up until which participant could accelerate. only relevant, if a_max>0
|
private |
lower bound on prediction width
|
private |
upper bound on prediction width