|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <anominalplanner.h>
Public Member Functions | |
| virtual void | compute (const VehicleMotionState9d &initial_state)=0 |
| virtual bool | hasValidPlan () const =0 |
| virtual const SetPointRequest * | getSetPointRequest () const =0 |
| virtual double | getCPUTime () const =0 |
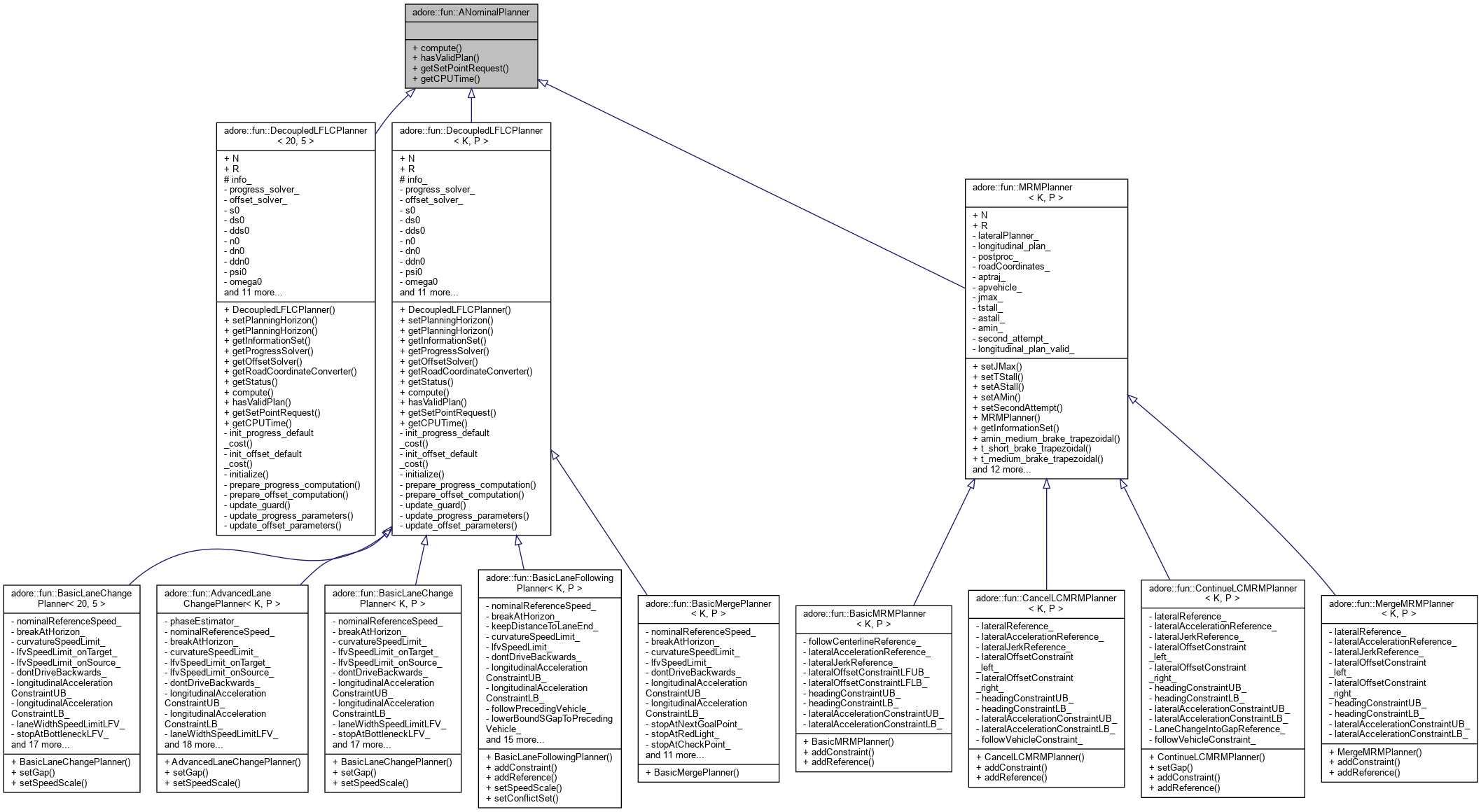
Interface for typical motion planning for automated driving.
|
pure virtual |
compute - try to compute a trajectory according to given constraints and objective
Implemented in adore::fun::DecoupledLFLCPlanner< K, P >, adore::fun::DecoupledLFLCPlanner< 20, 5 >, and adore::fun::MRMPlanner< K, P >.
|
pure virtual |
getCPUTime - return the time require for trajectory planning in seconds
Implemented in adore::fun::DecoupledLFLCPlanner< K, P >, adore::fun::DecoupledLFLCPlanner< 20, 5 >, and adore::fun::MRMPlanner< K, P >.
|
pure virtual |
getSetPointRequest - return computed trajectory in the form of a SetPointRequest
Implemented in adore::fun::DecoupledLFLCPlanner< K, P >, adore::fun::DecoupledLFLCPlanner< 20, 5 >, and adore::fun::MRMPlanner< K, P >.
|
pure virtual |
hasValidPlan - return true, if a trajectory was computed, which satisfies given constraints
Implemented in adore::fun::DecoupledLFLCPlanner< K, P >, adore::fun::DecoupledLFLCPlanner< 20, 5 >, and adore::fun::MRMPlanner< K, P >.