#include <setpointrequestswath.h>
◆ SetPointRequestSwath()
| adore::fun::SetPointRequestSwath::SetPointRequestSwath |
( |
double |
l, |
|
|
double |
w, |
|
|
double |
p, |
|
|
double |
lat_precision, |
|
|
double |
lat_error = 0.0, |
|
|
double |
lon_error = 0.0 |
|
) |
| |
|
inline |
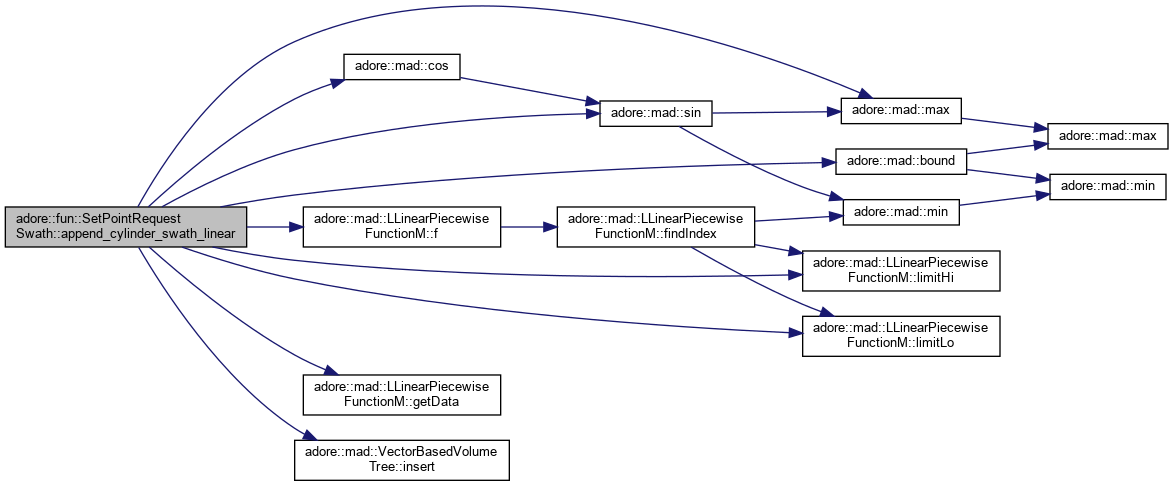
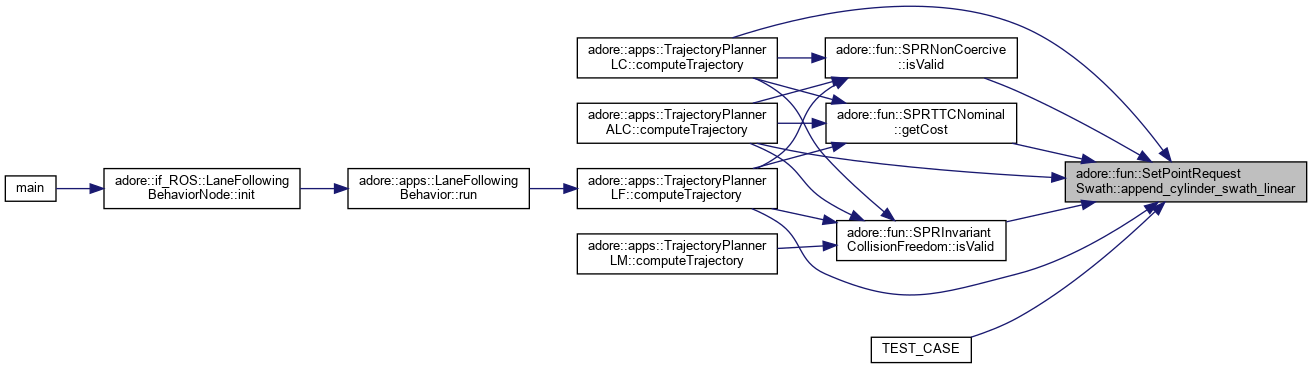
◆ append_cylinder_swath_linear()
Represents the space occupied by the vehicle during execution of a SetPointRequest as an OccupancyCylinderTree. It is assumed that deviation from the SetPointRequest is constant. The coverage is computed approximated using a simple, sampling-based approach with linear interpolation for the motion of the vehicle body. The curving of non-linear paths is ignored and it is assumed that interpolation of given SetPointRequest is sufficient to achieve desired precision. The resulting cylinders are appended to level 0 of the OccupancyCylinderTree.
◆ setAccelerationErrorSlow()
| void adore::fun::SetPointRequestSwath::setAccelerationErrorSlow |
( |
double |
value | ) |
|
|
inline |
◆ setDuration()
| void adore::fun::SetPointRequestSwath::setDuration |
( |
double |
value | ) |
|
|
inline |
◆ setL()
| void adore::fun::SetPointRequestSwath::setL |
( |
double |
value | ) |
|
|
inline |
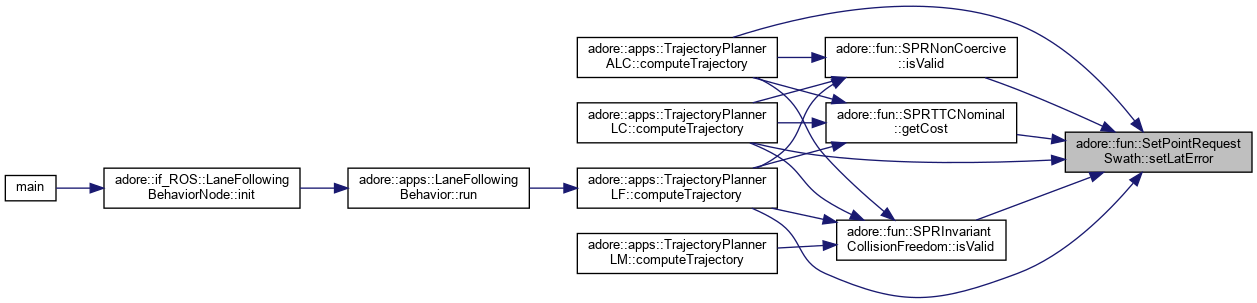
◆ setLatError()
| void adore::fun::SetPointRequestSwath::setLatError |
( |
double |
value | ) |
|
|
inline |
◆ setLatPrecision()
| void adore::fun::SetPointRequestSwath::setLatPrecision |
( |
double |
value | ) |
|
|
inline |
◆ setLonError()
| void adore::fun::SetPointRequestSwath::setLonError |
( |
double |
value | ) |
|
|
inline |
◆ setP()
| void adore::fun::SetPointRequestSwath::setP |
( |
double |
value | ) |
|
|
inline |
◆ setW()
| void adore::fun::SetPointRequestSwath::setW |
( |
double |
value | ) |
|
|
inline |
◆ a_e_
| double adore::fun::SetPointRequestSwath::a_e_ |
|
private |
being slower than expected acceleration error
◆ duration_
| double adore::fun::SetPointRequestSwath::duration_ |
|
private |
minimum prediction duration for vehicle in standstill
◆ l_
| double adore::fun::SetPointRequestSwath::l_ |
|
private |
◆ lat_error_
| double adore::fun::SetPointRequestSwath::lat_error_ |
|
private |
initial (and constant) (measurement) error to the side of the vehicle
◆ lat_precision_
| double adore::fun::SetPointRequestSwath::lat_precision_ |
|
private |
maximum lateral overapproximation of the vehicle body
◆ lon_error_
| double adore::fun::SetPointRequestSwath::lon_error_ |
|
private |
initial (measurement) error in movement direction of the vehicle
◆ p_
| double adore::fun::SetPointRequestSwath::p_ |
|
private |
distance from rear bumper to reference point of set point request
◆ w_
| double adore::fun::SetPointRequestSwath::w_ |
|
private |
The documentation for this class was generated from the following file: