#include <platoonLogic.h>
◆ CAR_FOLLOWING_TACTICS
◆ LanePosition
| Enumerator |
|---|
| offTheRoad | |
| hardShoulder | |
| outermostDrivingLane | |
| secondLaneFromOutside | |
| thirdLaneFromOutside | |
| fourthLaneFromOutside | |
| fifthLaneFromOutside | |
◆ platoonLogic()
◆ ~platoonLogic()
| adore::fun::platoonLogic::~platoonLogic |
( |
| ) |
|
|
inline |
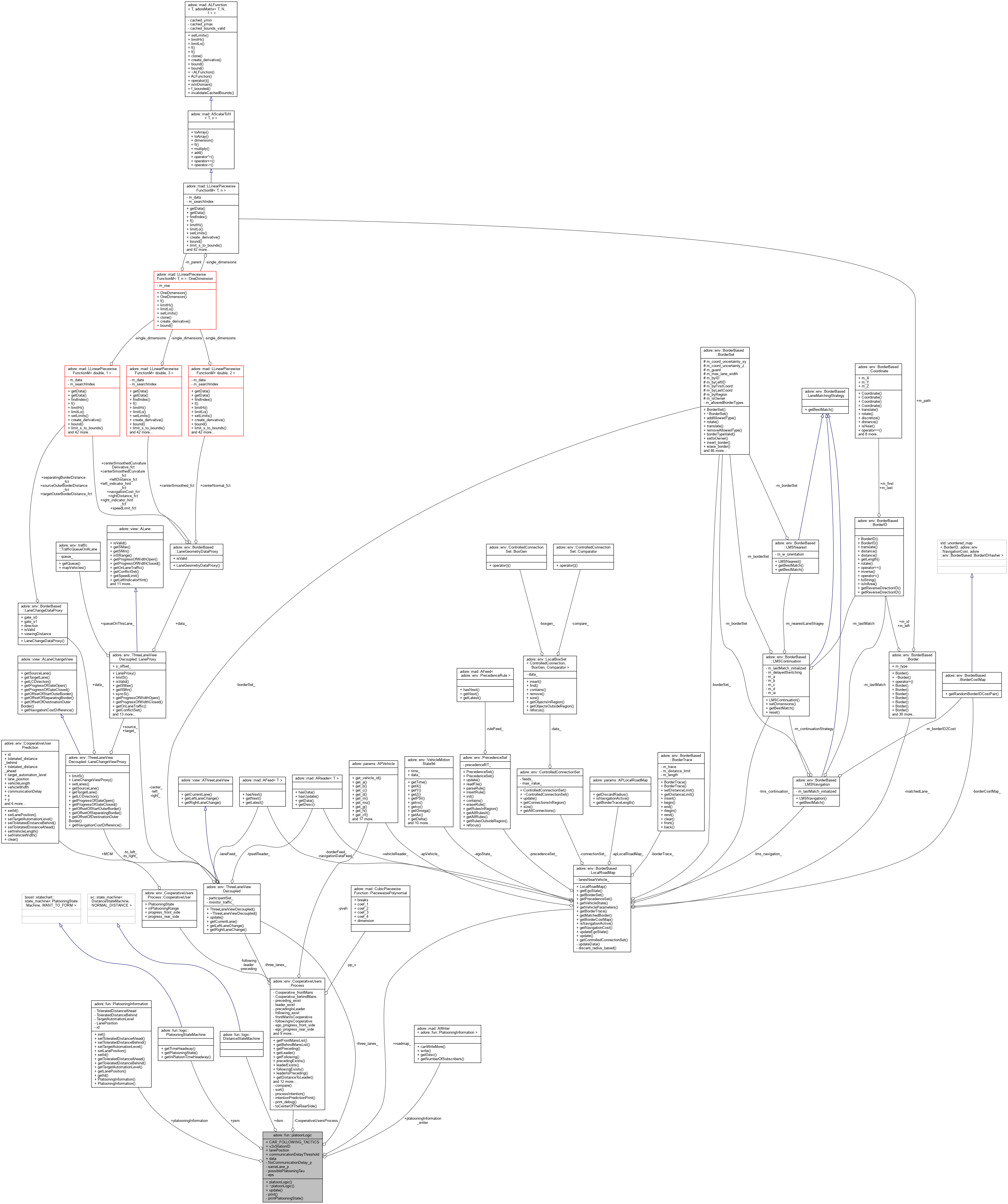
◆ print()
| void adore::fun::platoonLogic::print |
( |
| ) |
|
|
inlineprivate |
◆ printPlatooningState()
| void adore::fun::platoonLogic::printPlatooningState |
( |
int |
ps | ) |
|
|
inlineprivate |
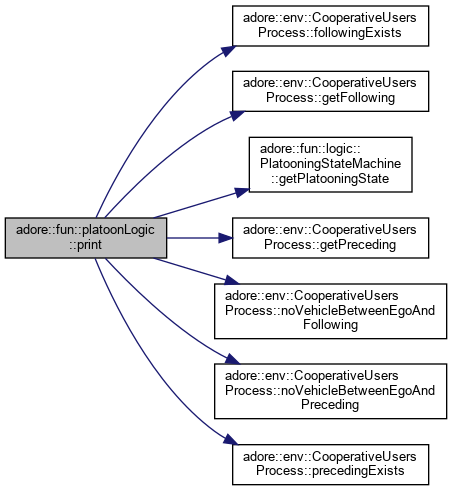
◆ update()
◆ CAR_FOLLOWING_TACTICS
◆ communicationDelayThreshold
| double adore::fun::platoonLogic::communicationDelayThreshold |
◆ CooperativeUsersProcess
◆ data
| Planner_data adore::fun::platoonLogic::data |
◆ dsm
◆ eps
| double adore::fun::platoonLogic::eps |
|
private |
◆ lanePosition
| int adore::fun::platoonLogic::lanePosition |
◆ NoCommunicationDelay_p
| bool adore::fun::platoonLogic::NoCommunicationDelay_p |
|
private |
◆ platooningInformation
◆ platooningInformation_writer
◆ possiblePlatooningTau
| double adore::fun::platoonLogic::possiblePlatooningTau |
|
private |
if the time headway to the preceding vehicle is less than this value we consider it for platooning
◆ psm
◆ roadmap_
roadmap is used for precedence rules
◆ sameLane_p
| bool adore::fun::platoonLogic::sameLane_p |
|
private |
◆ three_lanes_
◆ v2xStationID
| int adore::fun::platoonLogic::v2xStationID |
The documentation for this class was generated from the following file:
- /home/fascar/temp/adore/libadore/libadore/adore/fun/include/adore/fun/logic/platoonLogic.h