#include <funvehiclemotionstateconverter.h>
|
| | VehicleExtendedStateWriter (ros::NodeHandle *n, const std::string &gearStateTopic, const std::string &accelerationTopic, const std::string &accelerationActiveTopic, const std::string &steeringTopic, const std::string &leftIndicatorTopic, const std::string &rightIndicatorTopic, const std::string &checkpointClearanceTopic, int qsize) |
| |
| virtual bool | canWriteMore () const override |
| |
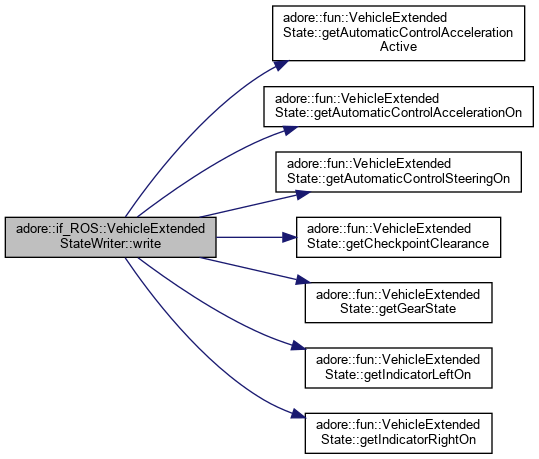
| virtual void | write (const adore::fun::VehicleExtendedState &value) override |
| | write sends out data value More...
|
| |
| virtual std::string | getDesc () |
| |
| virtual uint32_t | getNumberOfSubscribers () const |
| |
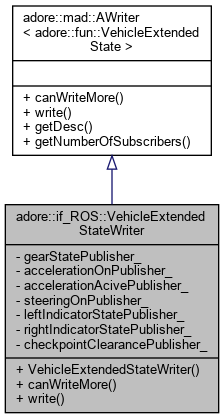
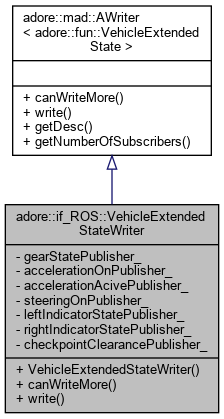
ROS specific implementation of AWriter for adore::fun::VehicleExtendedState. Transmits a adore::fun::VehicleExtendedState by sending several ROS std_msgs.
◆ VehicleExtendedStateWriter()
| adore::if_ROS::VehicleExtendedStateWriter::VehicleExtendedStateWriter |
( |
ros::NodeHandle * |
n, |
|
|
const std::string & |
gearStateTopic, |
|
|
const std::string & |
accelerationTopic, |
|
|
const std::string & |
accelerationActiveTopic, |
|
|
const std::string & |
steeringTopic, |
|
|
const std::string & |
leftIndicatorTopic, |
|
|
const std::string & |
rightIndicatorTopic, |
|
|
const std::string & |
checkpointClearanceTopic, |
|
|
int |
qsize |
|
) |
| |
|
inline |
◆ canWriteMore()
| virtual bool adore::if_ROS::VehicleExtendedStateWriter::canWriteMore |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ write()
◆ accelerationAcivePublisher_
| ros::Publisher adore::if_ROS::VehicleExtendedStateWriter::accelerationAcivePublisher_ |
|
private |
◆ accelerationOnPublisher_
| ros::Publisher adore::if_ROS::VehicleExtendedStateWriter::accelerationOnPublisher_ |
|
private |
◆ checkpointClearancePublisher_
| ros::Publisher adore::if_ROS::VehicleExtendedStateWriter::checkpointClearancePublisher_ |
|
private |
◆ gearStatePublisher_
| ros::Publisher adore::if_ROS::VehicleExtendedStateWriter::gearStatePublisher_ |
|
private |
◆ leftIndicatorStatePublisher_
| ros::Publisher adore::if_ROS::VehicleExtendedStateWriter::leftIndicatorStatePublisher_ |
|
private |
◆ rightIndicatorStatePublisher_
| ros::Publisher adore::if_ROS::VehicleExtendedStateWriter::rightIndicatorStatePublisher_ |
|
private |
◆ steeringOnPublisher_
| ros::Publisher adore::if_ROS::VehicleExtendedStateWriter::steeringOnPublisher_ |
|
private |
The documentation for this class was generated from the following file:


 Public Member Functions inherited from adore::mad::AWriter< adore::fun::VehicleExtendedState >
Public Member Functions inherited from adore::mad::AWriter< adore::fun::VehicleExtendedState >