|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <ros/ros.h>#include <adore_if_ros/ros_com_patterns.h>#include <adore/params/ap_tactical_planner.h>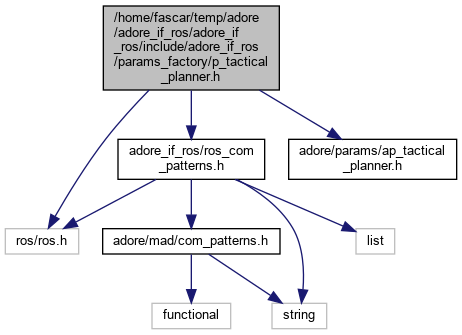

Go to the source code of this file.
Classes | |
| class | adore::if_ROS::params::PTacticalPlanner |
Namespaces | |
| adore | |
| adore::if_ROS | |
| adore::if_ROS::params | |