|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <simvehicleresetconverter.h>
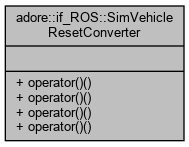
Public Member Functions | |
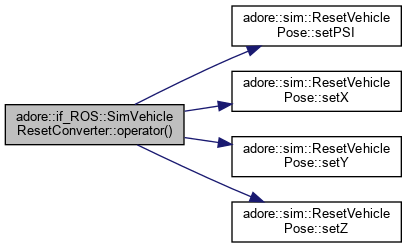
| void | operator() (geometry_msgs::PoseConstPtr msg, adore::sim::ResetVehiclePose &pose) |
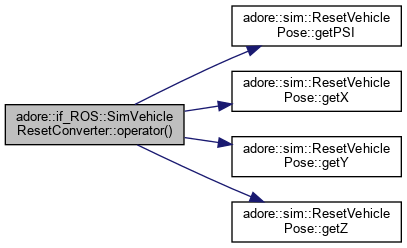
| geometry_msgs::Pose | operator() (const adore::sim::ResetVehiclePose &pose) |
| void | operator() (geometry_msgs::TwistConstPtr msg, adore::sim::ResetVehicleTwist &twist) |
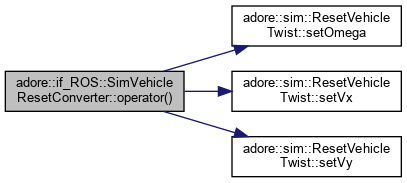
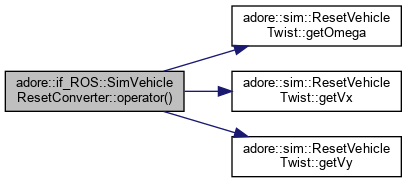
| geometry_msgs::Twist | operator() (const adore::sim::ResetVehicleTwist &twist) |
Convert between adore::sim::ResetVehicle(Pose/Twist) and ROS geometry_msgs::(Pose/Twist).
|
inline |
Convert adore::sim::ResetVehiclePowe to geometry_msgs::Pose
|
inline |
Convert adore::sim::ResetVehicleTwist to geometry_msgs::Twist
|
inline |
Convert geometry_msgs::Pose to adore::sim::ResetVehiclePose
|
inline |
Convert geometry_msgs::Twist to adore::sim::ResetVehicleTwist