|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
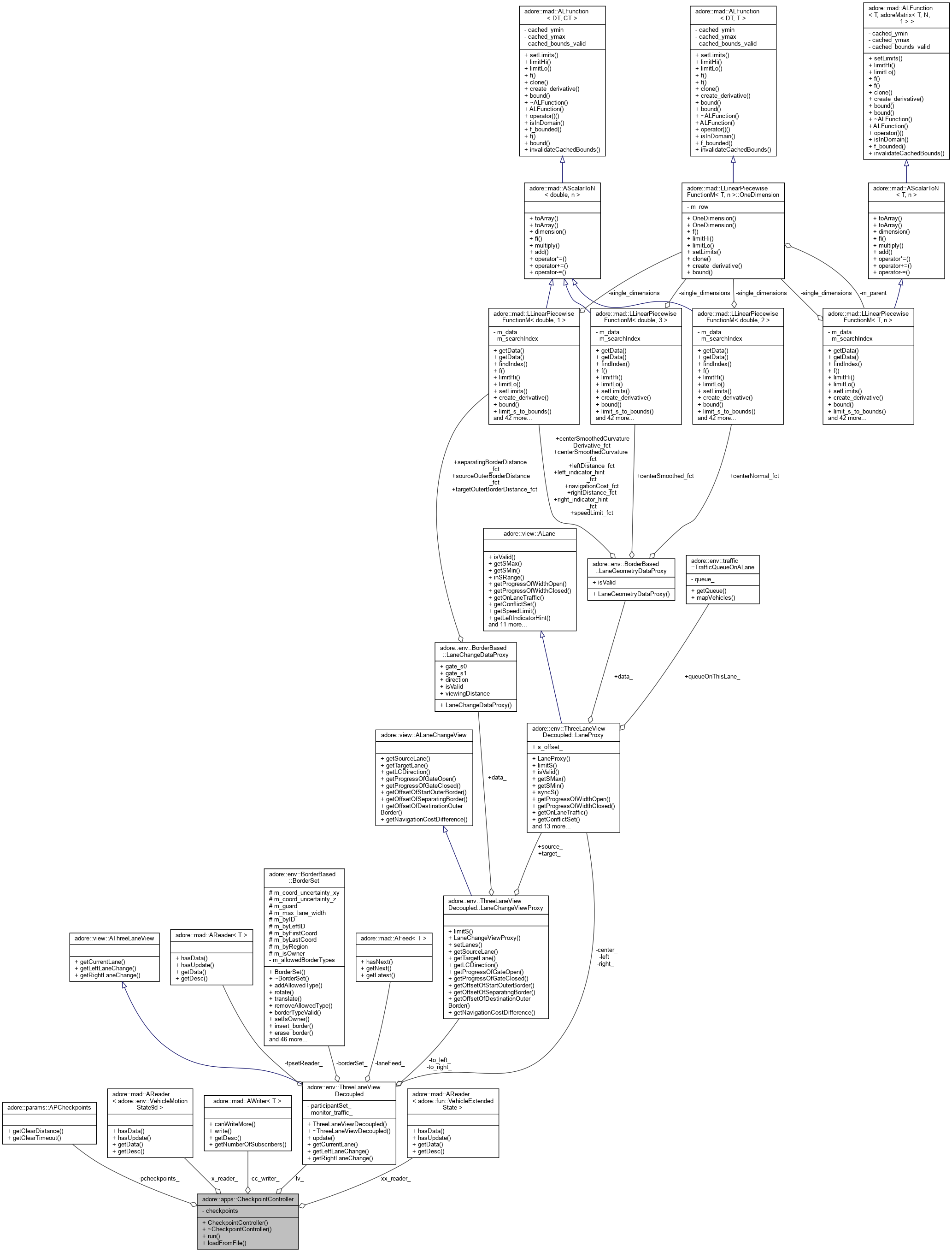
A set of virtual traffic lights are switched according to test driver input. CheckpointController is provided with a list of coorindates. Virtual traffic lights are placed at these coordinates, initially with red-light phase active. If a clearance button is pressed by the test driver, the nearest checkpoint traffic light in the lane-following view is switched to green-light for a given amount of time. More...
#include <checkpoint_controller.h>
Public Member Functions | |
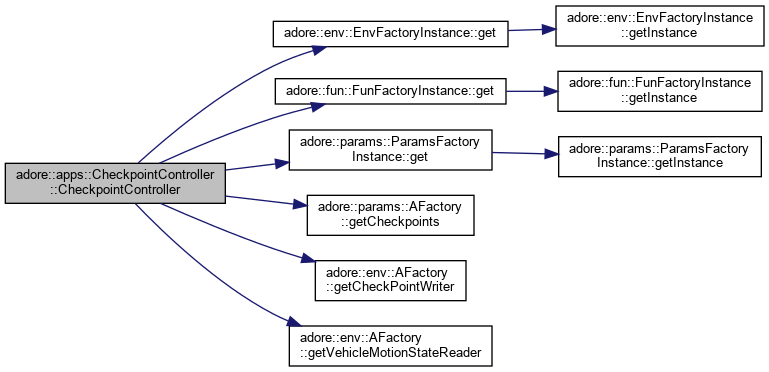
| CheckpointController () | |
| ~CheckpointController () | |
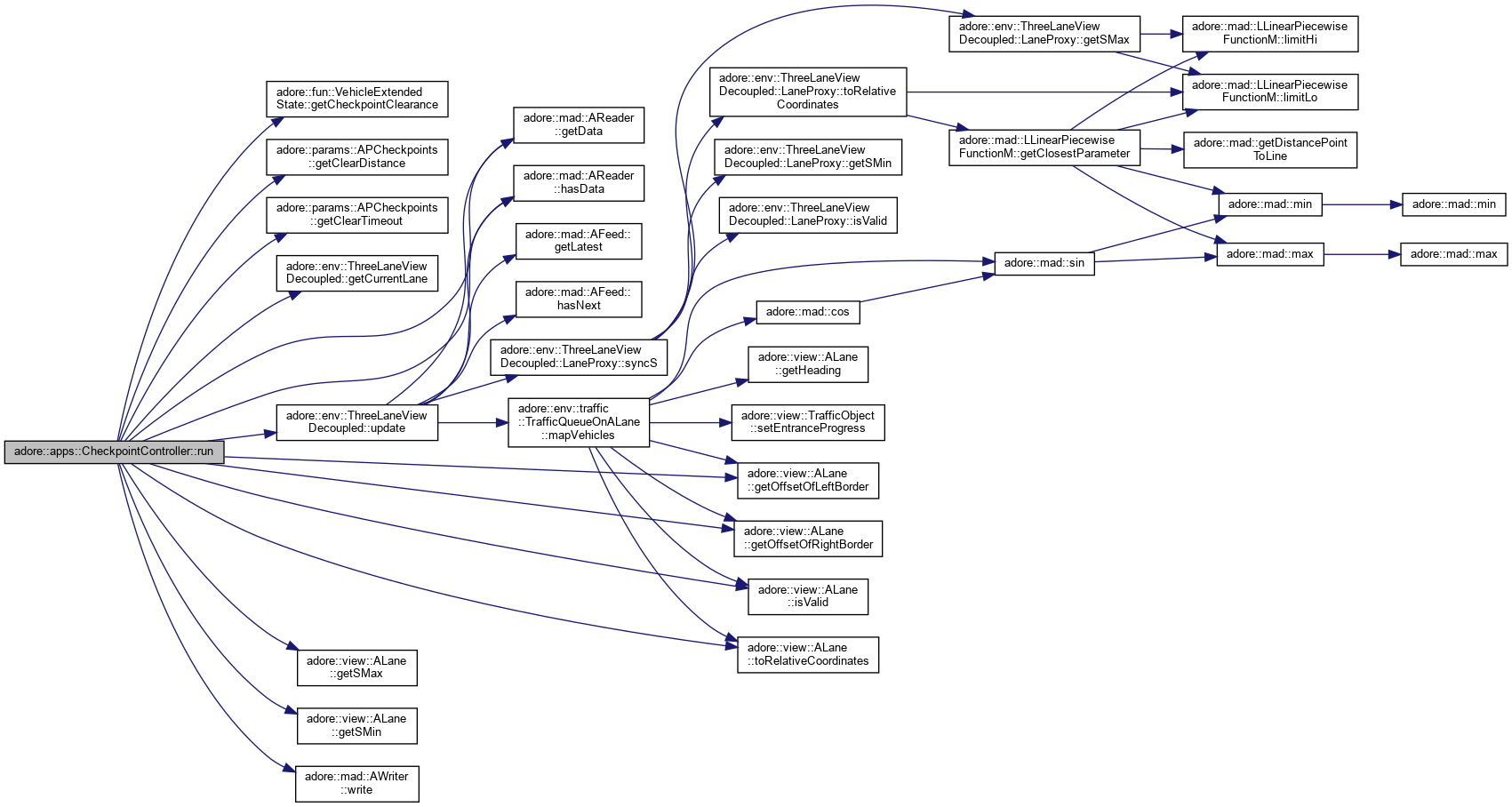
| void | run () |
| bool | loadFromFile (std::string filename) |
| read a set of 2d/3d coordinates from a csv file and add these to checkpoints_ More... | |
A set of virtual traffic lights are switched according to test driver input. CheckpointController is provided with a list of coorindates. Virtual traffic lights are placed at these coordinates, initially with red-light phase active. If a clearance button is pressed by the test driver, the nearest checkpoint traffic light in the lane-following view is switched to green-light for a given amount of time.
|
inline |
|
inline |
|
inline |
read a set of 2d/3d coordinates from a csv file and add these to checkpoints_
| filename | the input csv file path/filename The input text file should be structured as follows: X0; Y0[; Z0][#comment] X1; Y1[; Z1][#comment] .... E.g. two to three doubles per line, separated by semicolons, "[]" meaning optional. |

|
inline |

|
private |
write checkpoint state
|
private |
set of checkpoints
|
private |
project checkpoint to lane
|
private |
parameters for checkpoints
|
private |
compare vehicle position to checkpoint position
|
private |
get clearance button state