|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
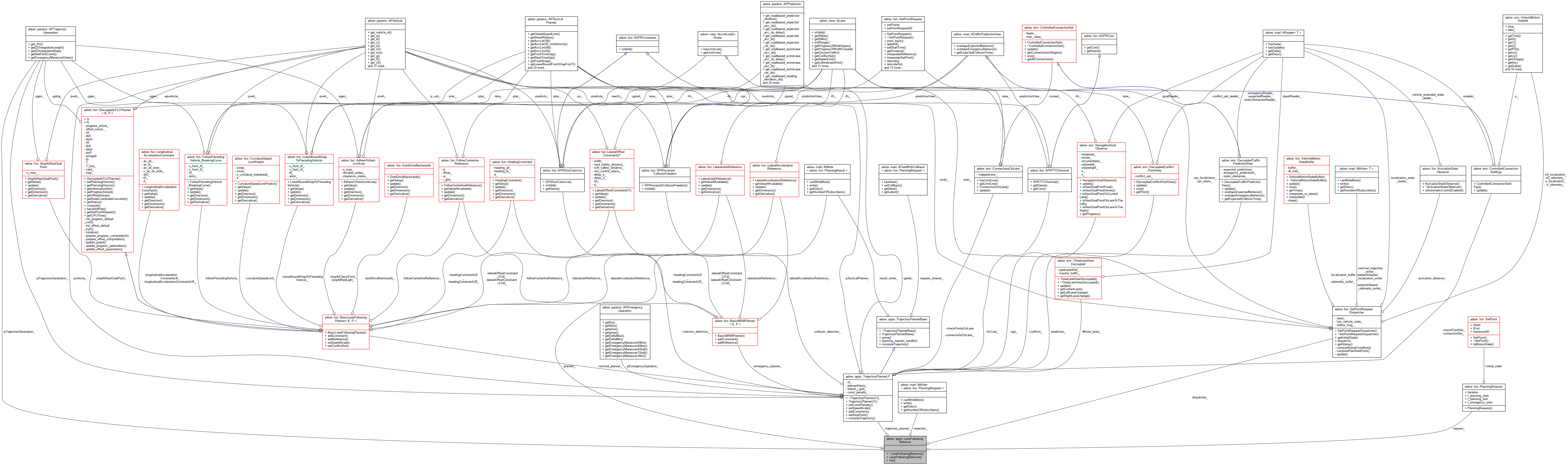
Decision making and maneuver planning, which realizes lane following only. Basically a wrapper for trajectory_planner_lf, with initial state selection and direct SetPointRequest output to controller. More...
#include <lane_following_behavior.h>
Public Member Functions | |
| virtual | ~LaneFollowingBehavior () |
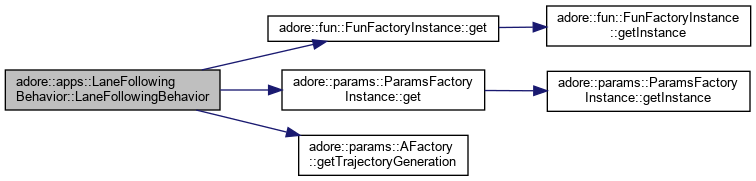
| LaneFollowingBehavior () | |
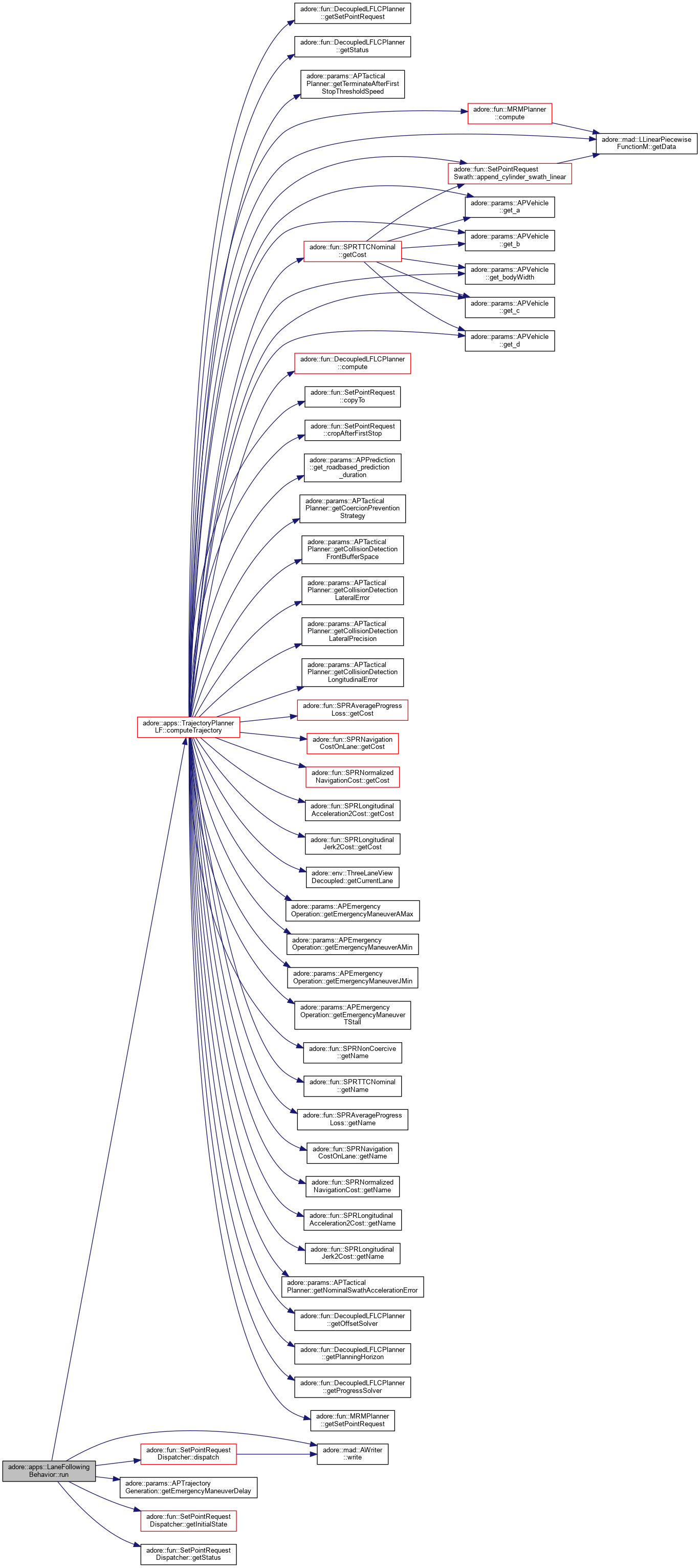
| void | run () |
| select initial state and recompute maneuver More... | |
Decision making and maneuver planning, which realizes lane following only. Basically a wrapper for trajectory_planner_lf, with initial state selection and direct SetPointRequest output to controller.
|
inlinevirtual |
|
inline |
|
inline |
select initial state and recompute maneuver

|
private |
dispatcher_ handles initial state selection and dispatching of setpointrequest
|
private |
sends planning results
|
private |
trajectory generation parameters
|
private |
the latests request
|
private |
sends planning requests
|
private |
trajectory_planner_ plans lane following maneuvers