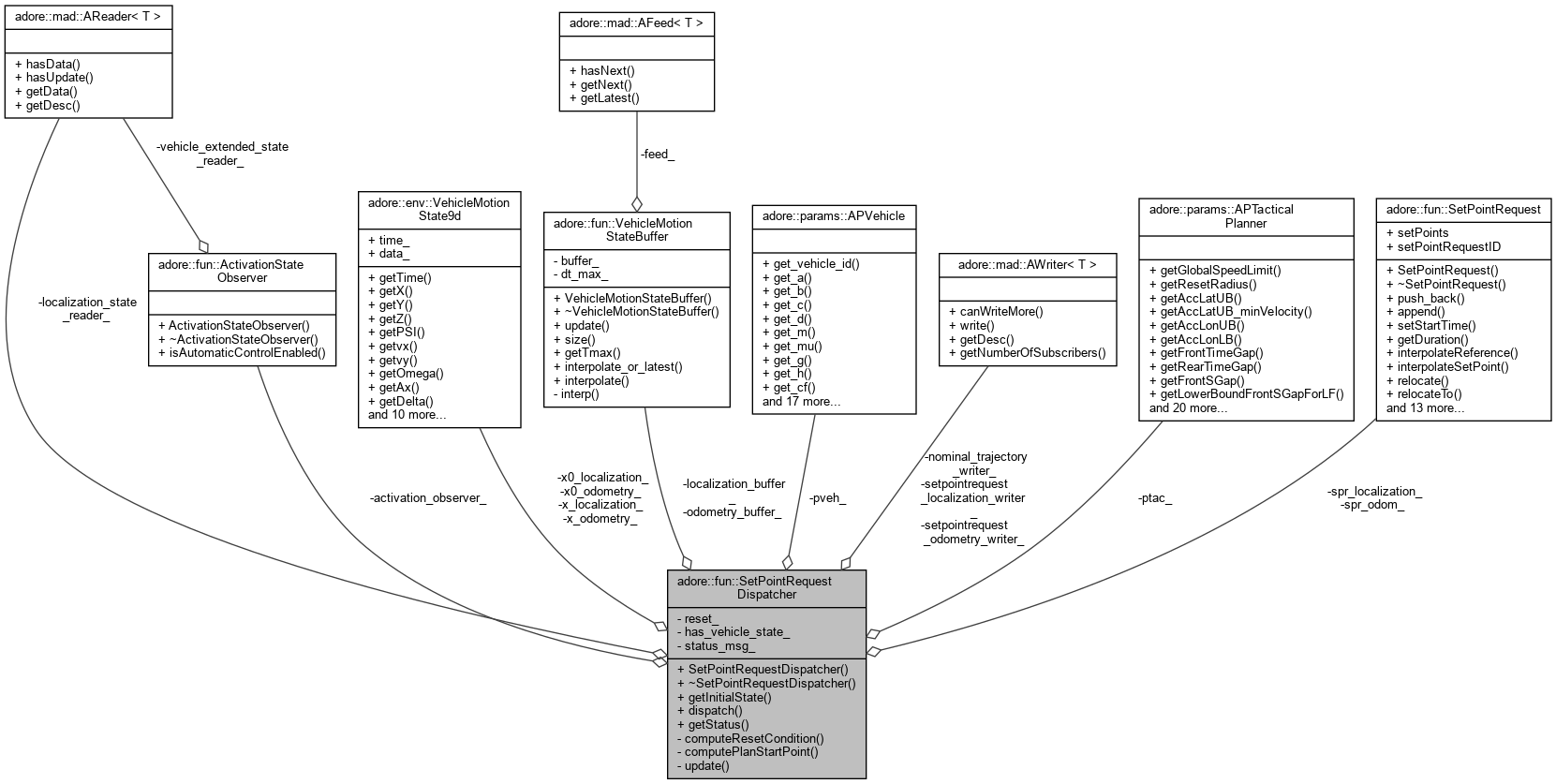
class helps to dispatch SetPointRequest to controller SetPointRequestDispatcher handles selection of initial state, coordinate conversion for odometry based tracking and dispatching of trajectories.
More...
#include <setpointrequest_dispatcher.h>
class helps to dispatch SetPointRequest to controller SetPointRequestDispatcher handles selection of initial state, coordinate conversion for odometry based tracking and dispatching of trajectories.
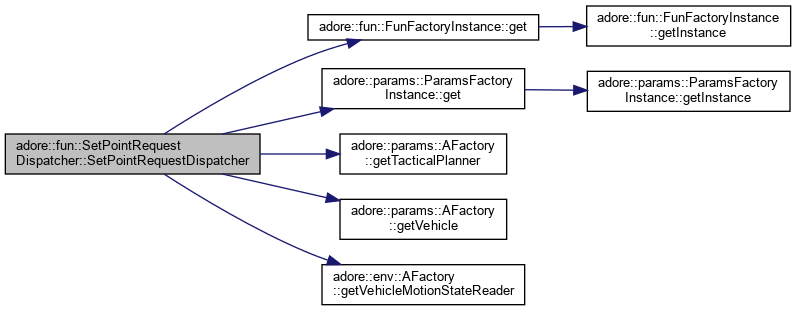
◆ SetPointRequestDispatcher()
| adore::fun::SetPointRequestDispatcher::SetPointRequestDispatcher |
( |
| ) |
|
|
inline |
◆ ~SetPointRequestDispatcher()
| adore::fun::SetPointRequestDispatcher::~SetPointRequestDispatcher |
( |
| ) |
|
|
inline |
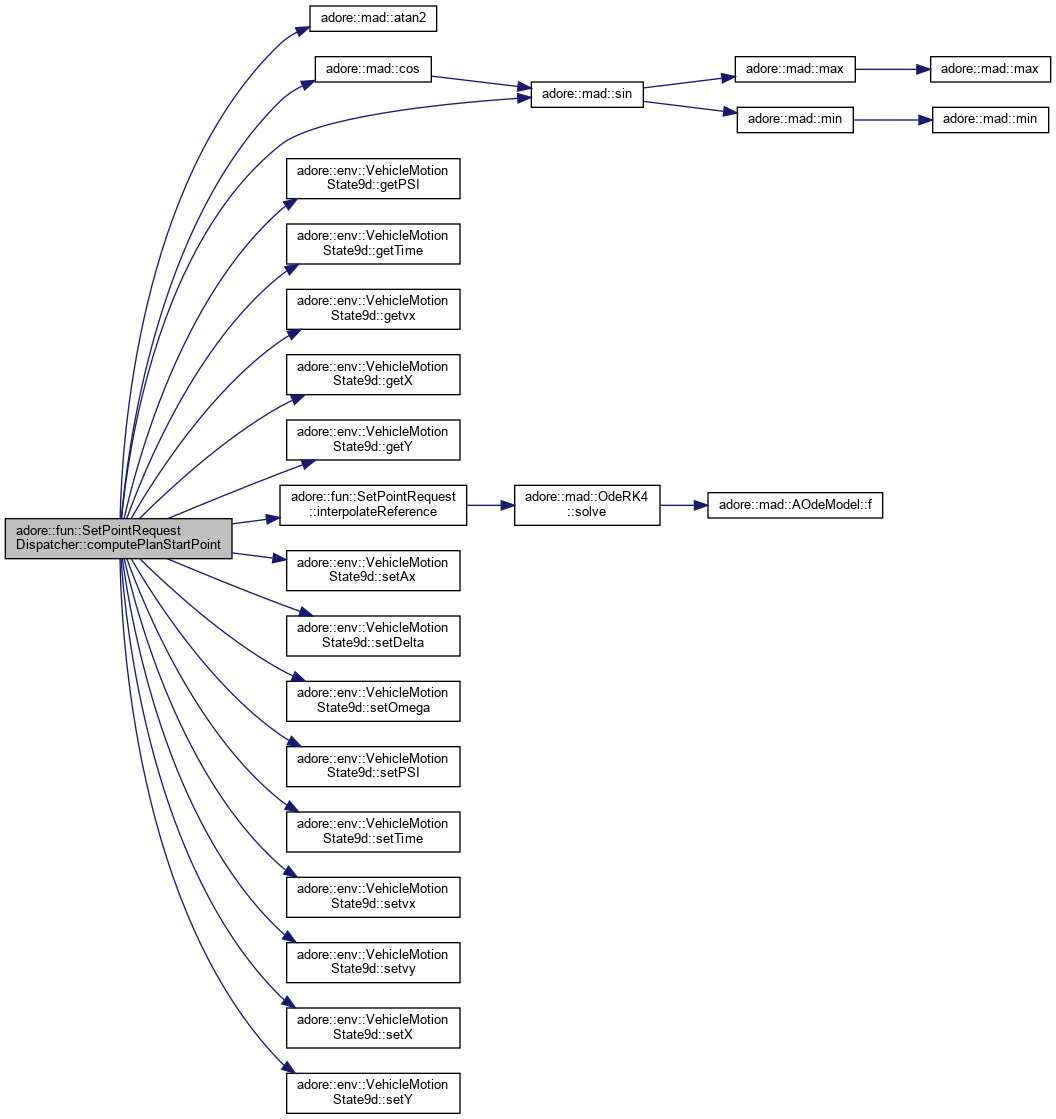
◆ computePlanStartPoint()
| void adore::fun::SetPointRequestDispatcher::computePlanStartPoint |
( |
| ) |
|
|
inlineprivate |
the position vector from state to trajectory in current odom frame, (et;en), awa heading vector in current odom frame, (epsit;epsin)
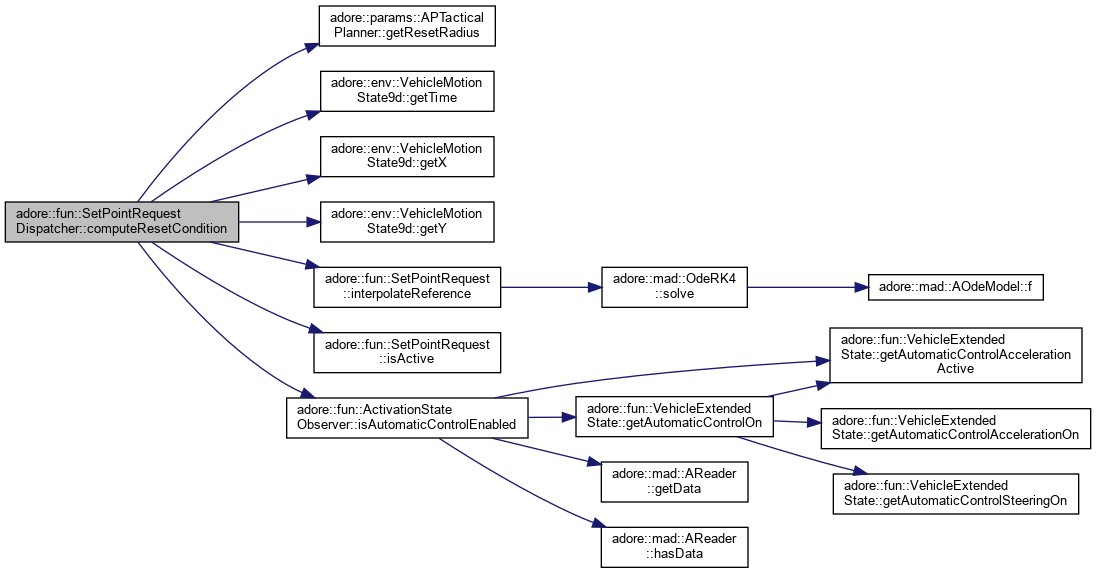
◆ computeResetCondition()
| void adore::fun::SetPointRequestDispatcher::computeResetCondition |
( |
| ) |
|
|
inlineprivate |
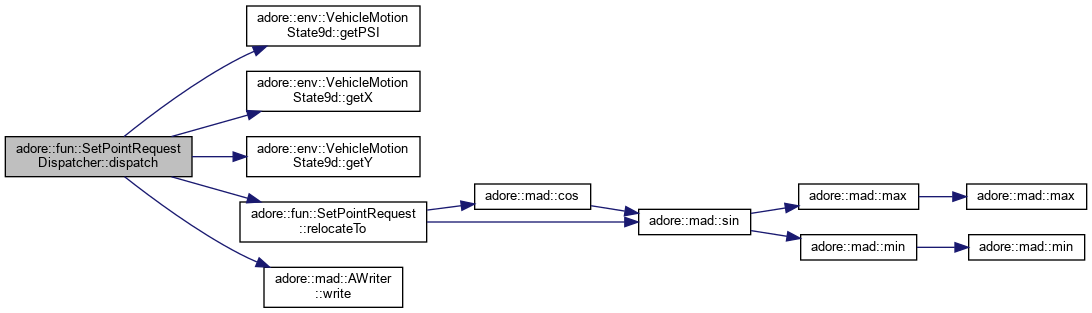
◆ dispatch()
dispatch SetPointRequests computed in localization coordinates The combined trajectory will be converted to odometry coordinates and published both in odometry and localization coordinates The nominal trajectory will be published in localization coordinates
- Parameters
-
| combined_trajectory | combined trajectory in localization coordinates |
| nominal_trajectory | nominal trajectory in localization coordinates |
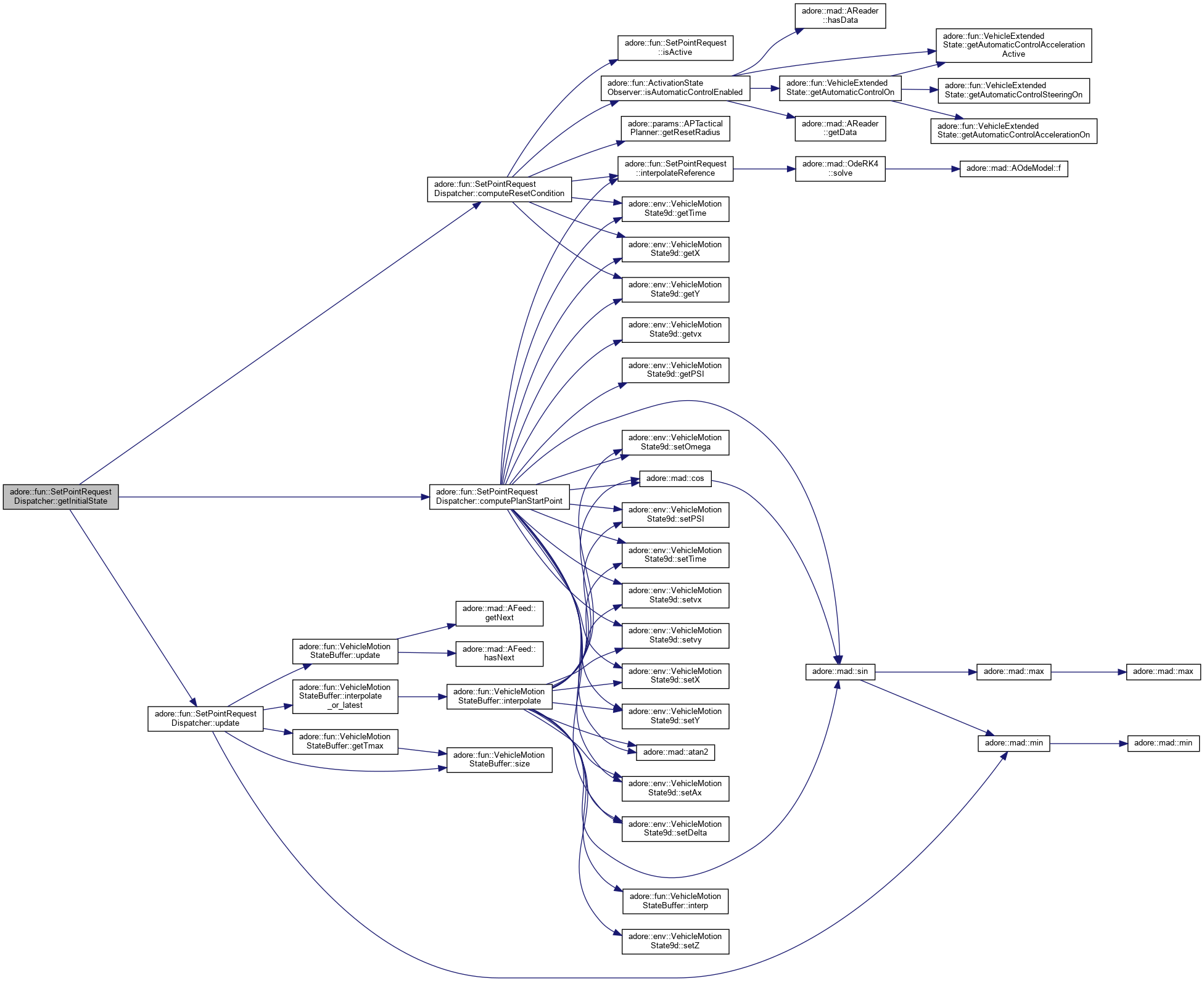
◆ getInitialState()
compute and return initial state for next planning iteration The according initial state in odometry coordinates is saved for the future dispatch of the planned trajectory.
- Returns
- VehicleMotionState9d in localization coordinates
◆ getStatus()
| std::string adore::fun::SetPointRequestDispatcher::getStatus |
( |
| ) |
|
|
inline |
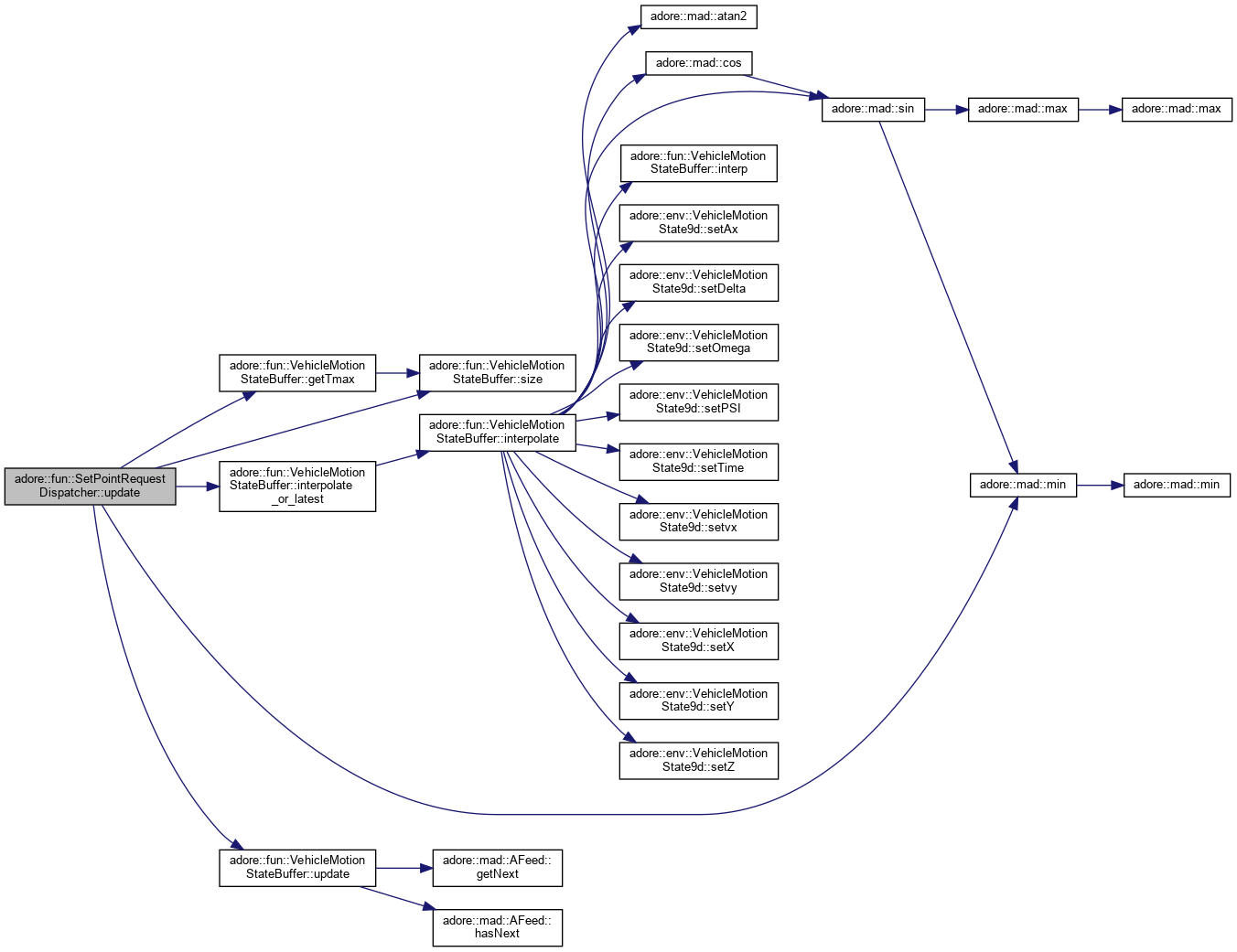
◆ update()
| void adore::fun::SetPointRequestDispatcher::update |
( |
| ) |
|
|
inlineprivate |
update vehicle state variables
◆ activation_observer_
is automation in control?
◆ has_vehicle_state_
| bool adore::fun::SetPointRequestDispatcher::has_vehicle_state_ |
|
private |
◆ localization_buffer_
get vehicle state from localization state estimator, use lowest time of both buffers for initial state
◆ localization_state_reader_
get vehicle state from localization state estimator
◆ nominal_trajectory_writer_
write nominal trajectory in localization coordinates
◆ odometry_buffer_
get vehicle state from odometry state estimator
◆ ptac_
tactical planner parameters
◆ pveh_
◆ reset_
| bool adore::fun::SetPointRequestDispatcher::reset_ |
|
private |
indicates whether start point is resetted
◆ setpointrequest_localization_writer_
write spr in localization coordinates
◆ setpointrequest_odometry_writer_
write spr in odometry coordinates
◆ spr_localization_
last spr written in localization coordinates
◆ spr_odom_
last spr written in odometry coordinates
◆ status_msg_
| std::string adore::fun::SetPointRequestDispatcher::status_msg_ |
|
private |
explanation why resetting
◆ x0_localization_
initial state in localization coordinates
◆ x0_odometry_
initial state in odometry coordinates
◆ x_localization_
state in localization coordinates
◆ x_odometry_
state in odometry coordinates
The documentation for this class was generated from the following file: