|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
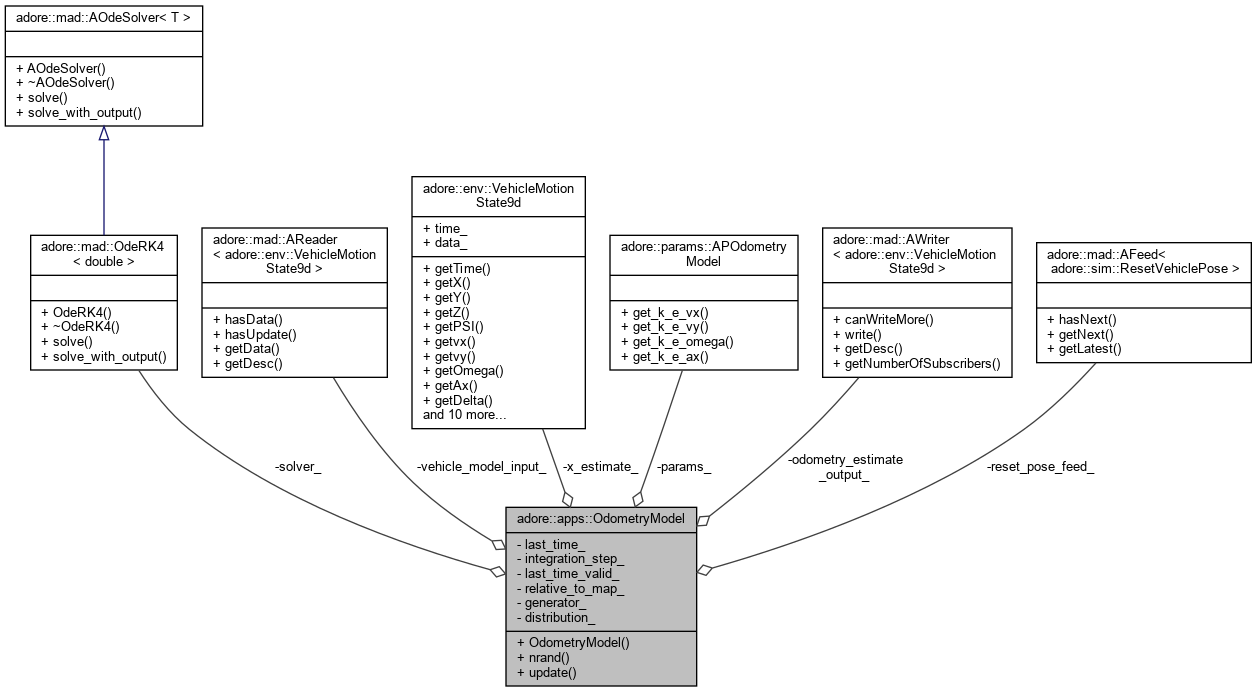
a model for odometry sensor integrates velocities as measured with errors More...
#include <odometrymodel.h>
Public Member Functions | |
| OdometryModel (adore::sim::AFactory *sim_factory=adore::sim::SimFactoryInstance::get(), adore::params::AFactory *paramfactory=adore::params::ParamsFactoryInstance::get(), unsigned int seed=0) | |
| double | nrand () |
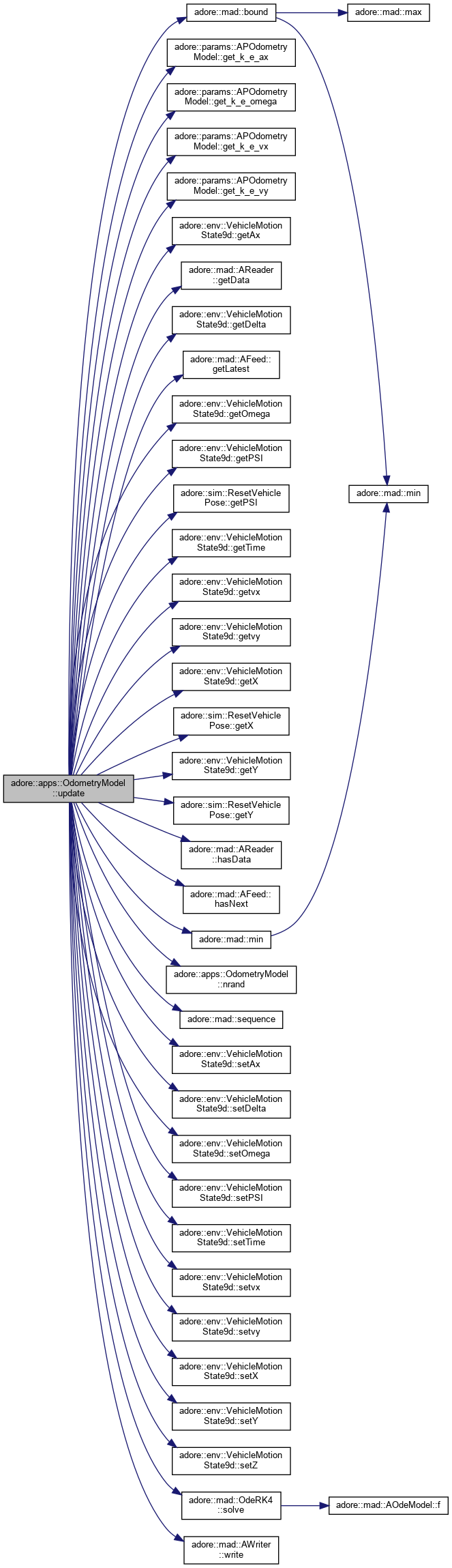
| virtual void | update () |
| simulation step of the odometry estimate model More... | |
Private Attributes | |
| double | last_time_ |
| double | integration_step_ |
| bool | last_time_valid_ |
| adore::fun::VehicleMotionState9d | x_estimate_ |
| bool | relative_to_map_ |
| std::default_random_engine | generator_ |
| std::normal_distribution< double > | distribution_ |
| adore::mad::AReader< adore::fun::VehicleMotionState9d > * | vehicle_model_input_ |
| adore::mad::AWriter< adore::fun::VehicleMotionState9d > * | odometry_estimate_output_ |
| adore::mad::OdeRK4< double > | solver_ |
| adore::mad::AFeed< adore::sim::ResetVehiclePose > * | reset_pose_feed_ |
| adore::params::APOdometryModel * | params_ |
a model for odometry sensor integrates velocities as measured with errors
|
inline |
|
inline |

|
inlinevirtual |
simulation step of the odometry estimate model

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
< reads "true" state from vehicle model
|
private |
< resets zero position (map origin) odometry based state estimation model parameters
|
private |
switch between map-relative odometry (default) and absolute odometry (debugging)
|
private |
|
private |
< writes "estimate" for vehicle state
|
private |
|
private |
last vehicle state estimate