#include <lanechangeconstraintsandreferences.h>
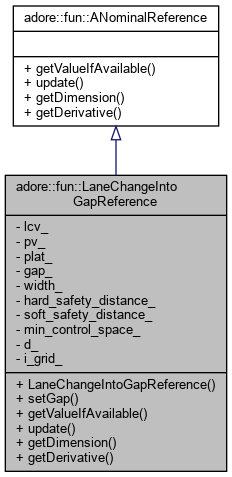
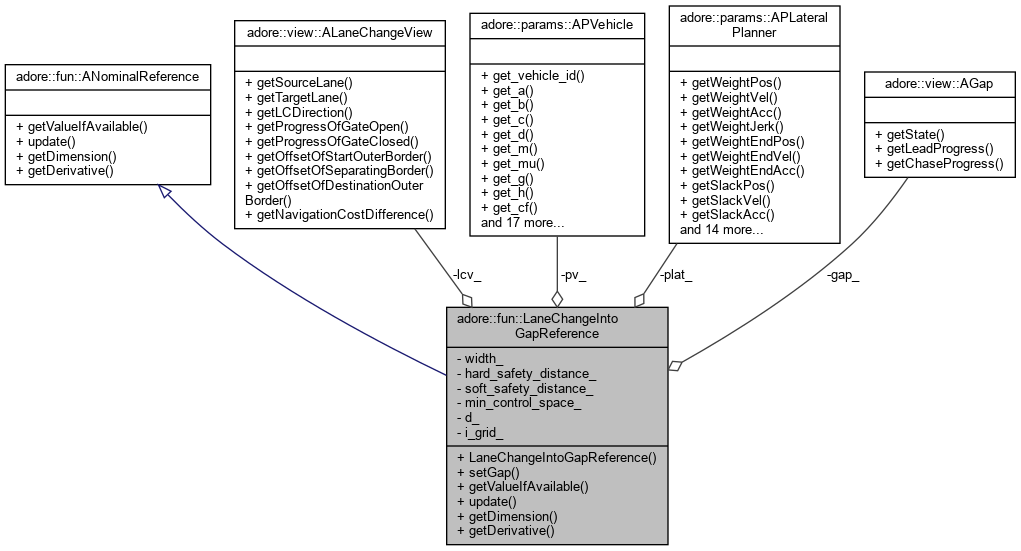
LaneChangeIntoGapReference - use this reference for lateral profile of lane changes
◆ LaneChangeIntoGapReference()
◆ getDerivative()
| virtual int adore::fun::LaneChangeIntoGapReference::getDerivative |
( |
| ) |
|
|
inlineoverridevirtual |
Determine for which derivative of given dimension this reference is responsible.
- Returns
- applicable to which state derivative
Implements adore::fun::ANominalReference.
◆ getDimension()
| virtual int adore::fun::LaneChangeIntoGapReference::getDimension |
( |
| ) |
|
|
inlineoverridevirtual |
Determine for which dimension this reference is responsible (e.g. longitudinal, lateral, etc.)
- Returns
- applicable to which dimension, depends on setup of planner
Implements adore::fun::ANominalReference.
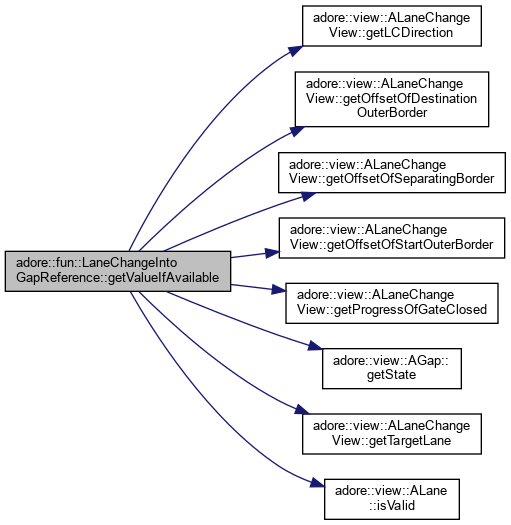
◆ getValueIfAvailable()
| virtual bool adore::fun::LaneChangeIntoGapReference::getValueIfAvailable |
( |
double |
t, |
|
|
double |
s, |
|
|
double |
ds, |
|
|
double & |
ref |
|
) |
| const |
|
inlineoverridevirtual |
Determine whether a reference is available and retrieve its value.
- Parameters
-
| t | time |
| s | progress along coordinate system |
- Returns
- true, if a reference is available
Implements adore::fun::ANominalReference.
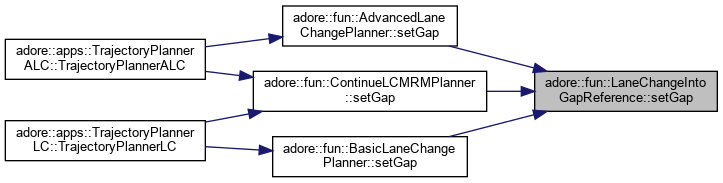
◆ setGap()
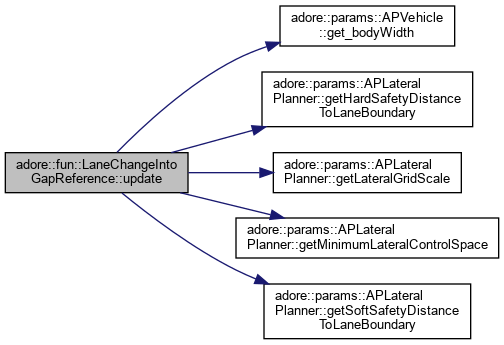
◆ update()
| virtual void adore::fun::LaneChangeIntoGapReference::update |
( |
double |
t0, |
|
|
double |
s0, |
|
|
double |
ds0 |
|
) |
| |
|
inlineoverridevirtual |
Refresh values of the reference object. Allows parameters and precomputations to buffered for one planning cycle.
- Parameters
-
| t0 | start time for planning |
| s0 | start progress in road-relative coordinate system |
| ds0 | derivative of s at t0 |
Implements adore::fun::ANominalReference.
◆ d_
| double adore::fun::LaneChangeIntoGapReference::d_ |
|
private |
◆ gap_
◆ hard_safety_distance_
| double adore::fun::LaneChangeIntoGapReference::hard_safety_distance_ |
|
private |
◆ i_grid_
| double adore::fun::LaneChangeIntoGapReference::i_grid_ |
|
private |
◆ lcv_
◆ min_control_space_
| double adore::fun::LaneChangeIntoGapReference::min_control_space_ |
|
private |
◆ plat_
◆ pv_
◆ soft_safety_distance_
| double adore::fun::LaneChangeIntoGapReference::soft_safety_distance_ |
|
private |
◆ width_
| double adore::fun::LaneChangeIntoGapReference::width_ |
|
private |
The documentation for this class was generated from the following file: