|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <basicsetpointrequestevaluators.h>
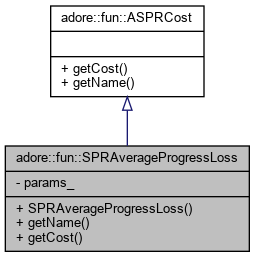

Public Member Functions | |
| SPRAverageProgressLoss (adore::params::APTacticalPlanner *params) | |
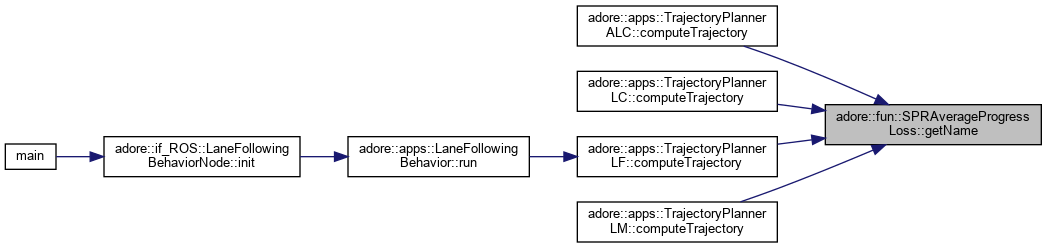
| virtual std::string | getName () const override |
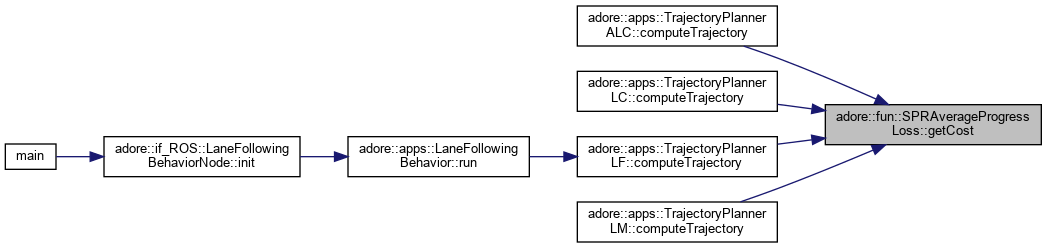
| virtual double | getCost (const adore::fun::SetPointRequest &spr) const override |
Private Attributes | |
| adore::params::APTacticalPlanner * | params_ |
computes average of lost progress for a plan: lost progress wrt moving at global_speed_limit
|
inline |
|
inlineoverridevirtual |
Implements adore::fun::ASPRCost.

|
inlineoverridevirtual |
Implements adore::fun::ASPRCost.
|
private |