|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <basicsetpointrequestevaluators.h>
Public Member Functions | |
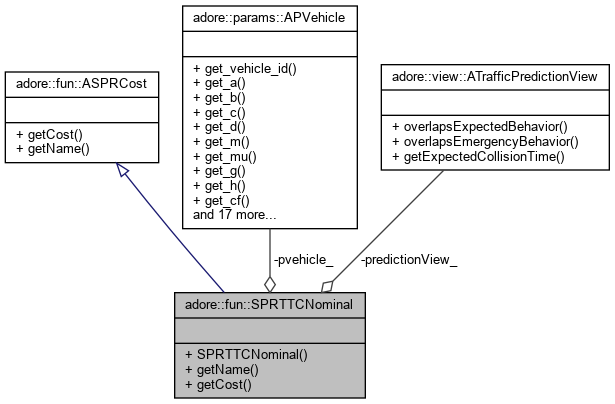
| SPRTTCNominal (adore::view::ATrafficPredictionView *predictionView, adore::params::APVehicle *pvehicle=adore::params::ParamsFactoryInstance::get() ->getVehicle()) | |
| virtual std::string | getName () const override |
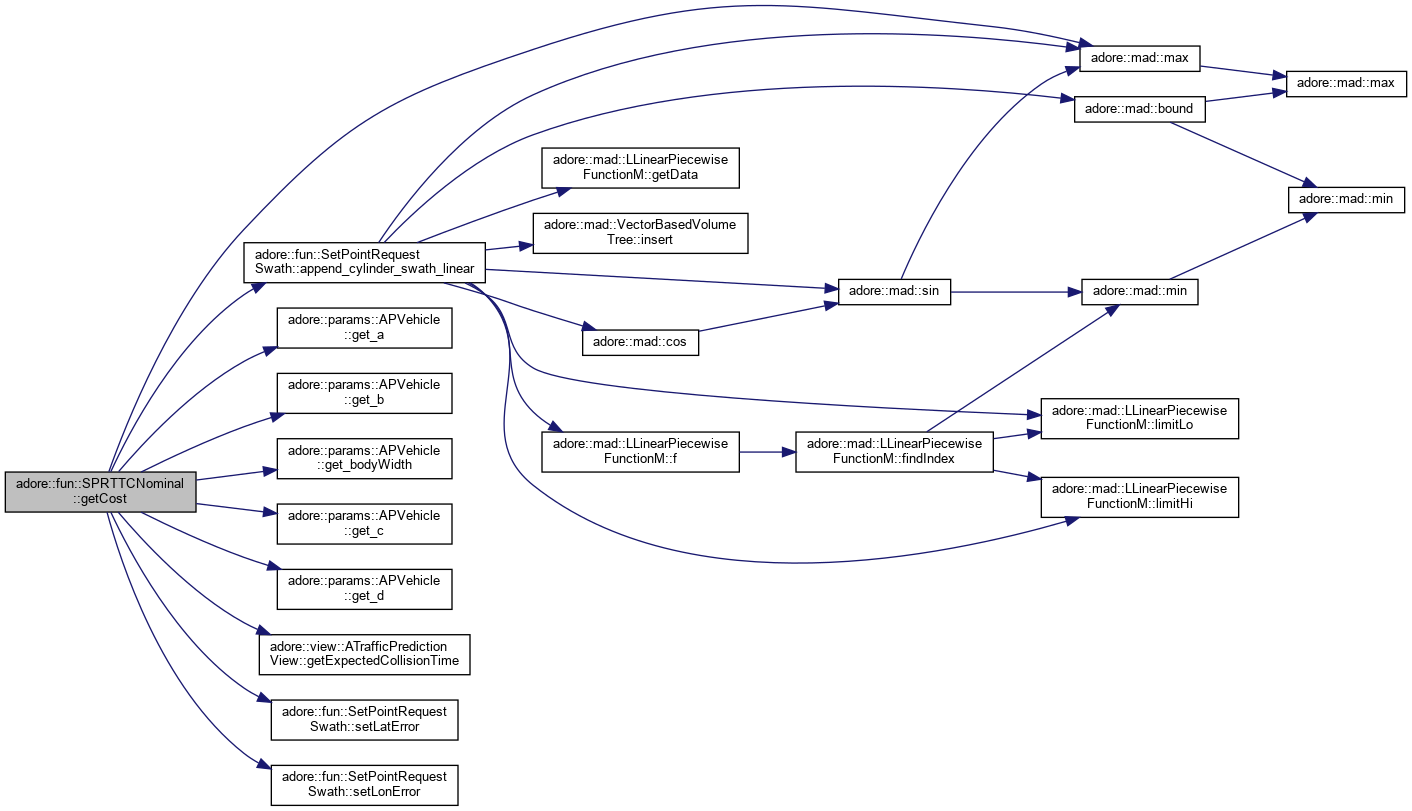
| virtual double | getCost (const adore::fun::SetPointRequest &spr) const override |
Private Attributes | |
| adore::view::ATrafficPredictionView * | predictionView_ |
| adore::params::APVehicle * | pvehicle_ |
Apply SPRTTCNominal to nominal maneuver to test for expected time to collison of nominal maneuver with other objects. The cost value returned is ((t_max-ttc)/t_max)^2 \in [0,1]
|
inline |
|
inlineoverridevirtual |
Implements adore::fun::ASPRCost.

|
inlineoverridevirtual |
Implements adore::fun::ASPRCost.

|
private |
|
private |