|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <vlb_openloop.h>
Public Member Functions | |
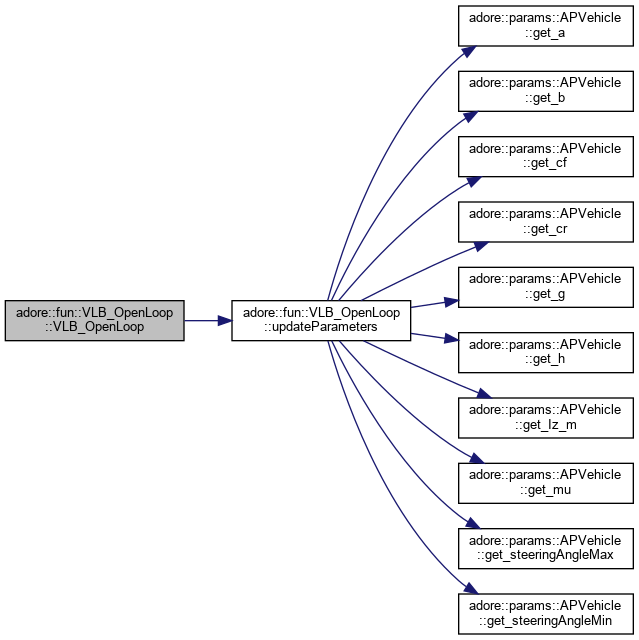
| VLB_OpenLoop (adore::params::APVehicle *p) | |
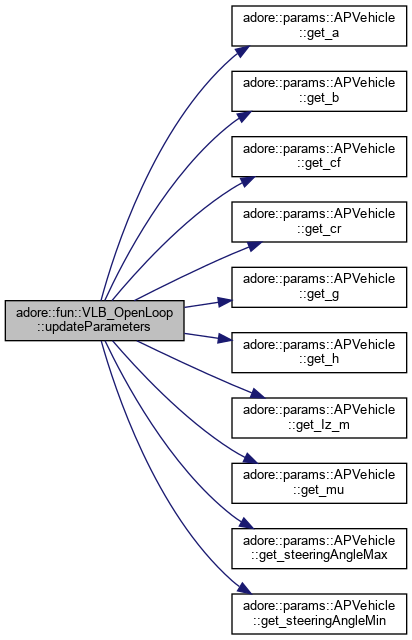
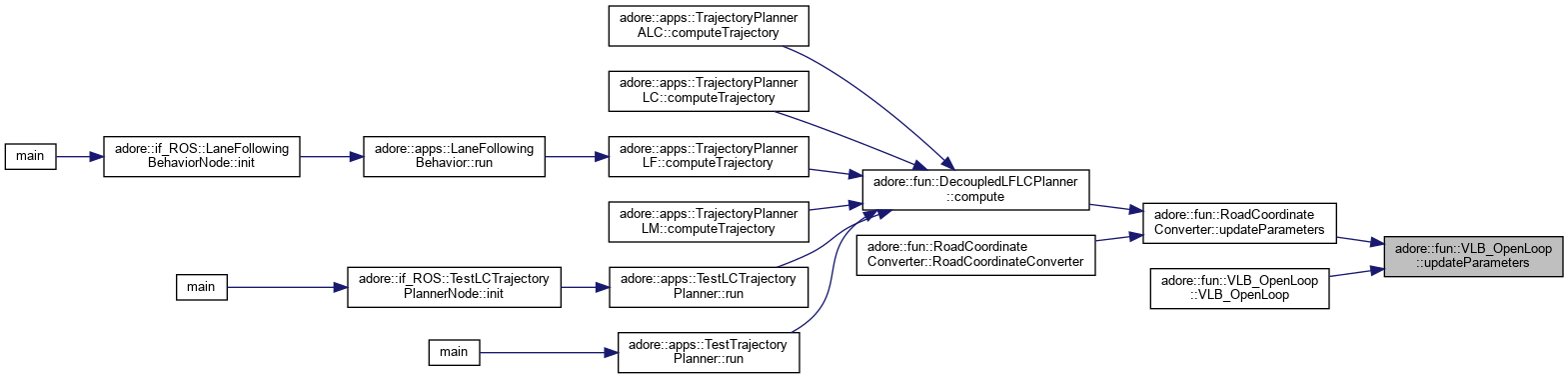
| void | updateParameters (adore::params::APVehicle *p) |
| void | setReference (double value) |
| void | setGearState (VehicleExtendedState::GearState value) |
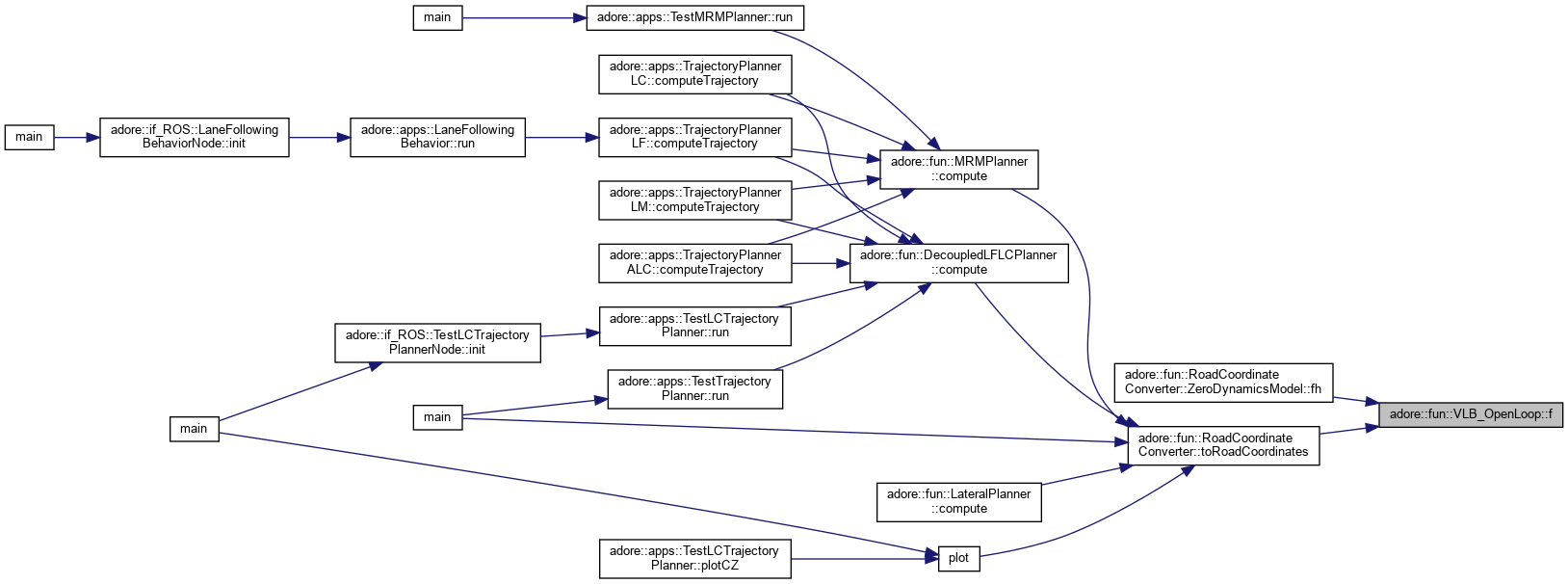
| virtual void | f (double t, const adoreMatrix< double, 0, 1 > &x_in, adoreMatrix< double, 0, 1 > &dx_out) |
 Public Member Functions inherited from adore::mad::AOdeModel< double > Public Member Functions inherited from adore::mad::AOdeModel< double > | |
| AOdeModel () | |
| virtual | ~AOdeModel () |
Private Attributes | |
| double | lambda_ |
| double | a_ |
| double | b_ |
| double | L_ |
| double | h_ |
| double | g_ |
| double | mu_ |
| double | cf_ |
| double | cr_ |
| double | Iz_m_ |
| double | delta_max_ |
| double | delta_min_ |
| VehicleExtendedState::GearState | gearState_ |
An open loop vehicle bicycle model with linear tire forces. The state vector of the model contains the position of a reference point defined by parameter lambda: Lambda is the distance from the center of the rear axle (COR) to the reference point. The lateral speed vy (corresponding to slip angle beta in other models) is given also for the reference point. The gear state is applied as a static parameter in the differential equation.
|
inline |
Constructor
| p | vehicle parameters |
|
inlinevirtual |
f computes the derivative at time t and state x_in. the result is placed in the matrix/vector x_out. R^10: [X,Y,psi,vx,vy,omega, ax, delta, dax, ddelta]
| t | time (not used here) |
| x_in | current state |
| dx_out | derivative of state, output of the function |
Implements adore::mad::AOdeModel< double >.

|
inline |
set the gear state
| value | the new gear state |
|
inline |
set the position of the reference point
| value | the new reference point position |
|
inline |
Read the parameters again.
| p | vehicle parameters |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |