|
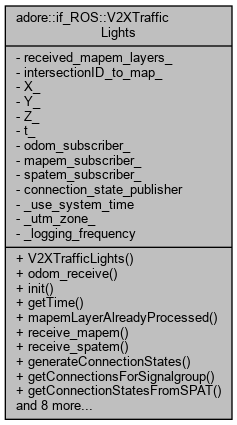
| | V2XTrafficLights () |
| |
| void | odom_receive (nav_msgs::OdometryConstPtr msg) |
| |
| void | init (int argc, char **argv, double rate, std::string nodename) |
| |
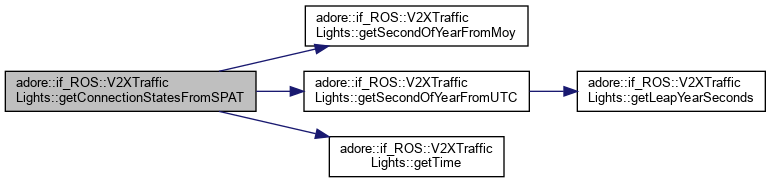
| double | getTime () |
| |
| bool | mapemLayerAlreadyProcessed (int station_id, int layer_id, std::unordered_map< int, std::vector< int >> &map_to_analyse) |
| |
| void | receive_mapem (dsrc_v2_mapem_pdu_descriptions::MAPEM msg) |
| |
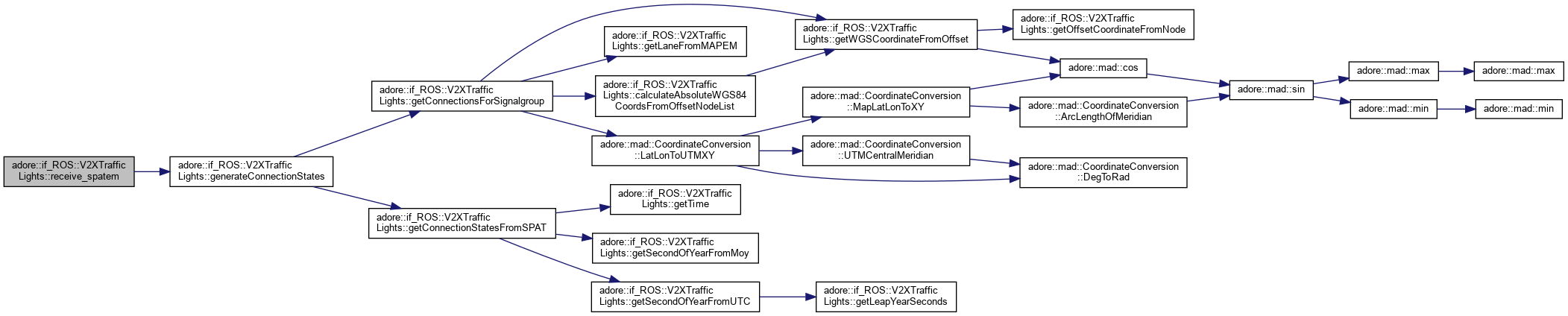
| void | receive_spatem (dsrc_v2_spatem_pdu_descriptions::SPATEM msg) |
| |
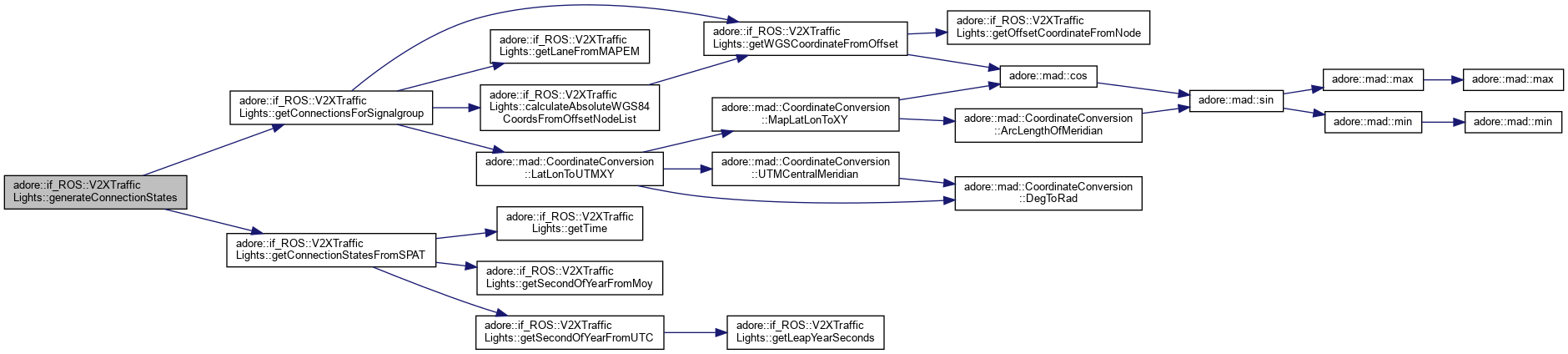
| virtual std::vector< adore_if_ros_msg::TCDConnectionStateTrace > | generateConnectionStates (dsrc_v2_spatem_pdu_descriptions::SPATEM msg) |
| |
| virtual std::vector< adore_if_ros_msg::Connection > | getConnectionsForSignalgroup (int intersectionID, u_int8_t signal_group) |
| |
| virtual std::vector< adore_if_ros_msg::TCDConnectionState > | getConnectionStatesFromSPAT (u_int8_t signal_group, dsrc_v2_dsrc::IntersectionState &spat) |
| |
| virtual dsrc_v2_dsrc::GenericLane | getLaneFromMAPEM (u_int32_t intersection_id, u_int8_t lane_id, MAPEMContainer &mapem_mmap) |
| |
| virtual void | getOffsetCoordinateFromNode (dsrc_v2_dsrc::NodeXY &node, double &lat, double &lon) |
| |
| virtual void | getWGSCoordinateFromOffset (double lat_ref, double lon_ref, dsrc_v2_dsrc::NodeXY &delta_node) |
| |
| virtual void | calculateAbsoluteWGS84CoordsFromOffsetNodeList (double lat_ref, double lon_ref, dsrc_v2_dsrc::NodeListXY &nodeList) |
| |
| virtual int | getLeapYearSeconds (double vehicle_time) |
| |
| virtual double | getSecondOfYearFromUTC (double time) |
| |
| virtual double | getSecondOfYearFromMoy (int32_t moy, u_int16_t dsecond) |
| |
| virtual double | secondsToChange (double vehicle_second_of_year, double spat_second_of_year, double validility_time) |
| |
|
| typedef std::unordered_multimap< u_int32_t, dsrc_v2_dsrc::IntersectionGeometry > | MAPEMContainer |
| |
◆ MAPEMContainer
◆ V2XTrafficLights()
| adore::if_ROS::V2XTrafficLights::V2XTrafficLights |
( |
| ) |
|
|
inline |
◆ calculateAbsoluteWGS84CoordsFromOffsetNodeList()
| virtual void adore::if_ROS::V2XTrafficLights::calculateAbsoluteWGS84CoordsFromOffsetNodeList |
( |
double |
lat_ref, |
|
|
double |
lon_ref, |
|
|
dsrc_v2_dsrc::NodeListXY & |
nodeList |
|
) |
| |
|
inlinevirtual |
◆ generateConnectionStates()
| virtual std::vector<adore_if_ros_msg::TCDConnectionStateTrace> adore::if_ROS::V2XTrafficLights::generateConnectionStates |
( |
dsrc_v2_spatem_pdu_descriptions::SPATEM |
msg | ) |
|
|
inlinevirtual |
◆ getConnectionsForSignalgroup()
| virtual std::vector<adore_if_ros_msg::Connection> adore::if_ROS::V2XTrafficLights::getConnectionsForSignalgroup |
( |
int |
intersectionID, |
|
|
u_int8_t |
signal_group |
|
) |
| |
|
inlinevirtual |
◆ getConnectionStatesFromSPAT()
| virtual std::vector<adore_if_ros_msg::TCDConnectionState> adore::if_ROS::V2XTrafficLights::getConnectionStatesFromSPAT |
( |
u_int8_t |
signal_group, |
|
|
dsrc_v2_dsrc::IntersectionState & |
spat |
|
) |
| |
|
inlinevirtual |
◆ getLaneFromMAPEM()
| virtual dsrc_v2_dsrc::GenericLane adore::if_ROS::V2XTrafficLights::getLaneFromMAPEM |
( |
u_int32_t |
intersection_id, |
|
|
u_int8_t |
lane_id, |
|
|
MAPEMContainer & |
mapem_mmap |
|
) |
| |
|
inlinevirtual |
◆ getLeapYearSeconds()
| virtual int adore::if_ROS::V2XTrafficLights::getLeapYearSeconds |
( |
double |
vehicle_time | ) |
|
|
inlinevirtual |
◆ getOffsetCoordinateFromNode()
| virtual void adore::if_ROS::V2XTrafficLights::getOffsetCoordinateFromNode |
( |
dsrc_v2_dsrc::NodeXY & |
node, |
|
|
double & |
lat, |
|
|
double & |
lon |
|
) |
| |
|
inlinevirtual |
helper methods for geo- and time manipulation
◆ getSecondOfYearFromMoy()
| virtual double adore::if_ROS::V2XTrafficLights::getSecondOfYearFromMoy |
( |
int32_t |
moy, |
|
|
u_int16_t |
dsecond |
|
) |
| |
|
inlinevirtual |
◆ getSecondOfYearFromUTC()
| virtual double adore::if_ROS::V2XTrafficLights::getSecondOfYearFromUTC |
( |
double |
time | ) |
|
|
inlinevirtual |
◆ getTime()
| double adore::if_ROS::V2XTrafficLights::getTime |
( |
| ) |
|
|
inline |
◆ getWGSCoordinateFromOffset()
| virtual void adore::if_ROS::V2XTrafficLights::getWGSCoordinateFromOffset |
( |
double |
lat_ref, |
|
|
double |
lon_ref, |
|
|
dsrc_v2_dsrc::NodeXY & |
delta_node |
|
) |
| |
|
inlinevirtual |
◆ init()
| void adore::if_ROS::V2XTrafficLights::init |
( |
int |
argc, |
|
|
char ** |
argv, |
|
|
double |
rate, |
|
|
std::string |
nodename |
|
) |
| |
|
inline |
◆ mapemLayerAlreadyProcessed()
| bool adore::if_ROS::V2XTrafficLights::mapemLayerAlreadyProcessed |
( |
int |
station_id, |
|
|
int |
layer_id, |
|
|
std::unordered_map< int, std::vector< int >> & |
map_to_analyse |
|
) |
| |
|
inline |
◆ odom_receive()
| void adore::if_ROS::V2XTrafficLights::odom_receive |
( |
nav_msgs::OdometryConstPtr |
msg | ) |
|
|
inline |
◆ receive_mapem()
| void adore::if_ROS::V2XTrafficLights::receive_mapem |
( |
dsrc_v2_mapem_pdu_descriptions::MAPEM |
msg | ) |
|
|
inline |
◆ receive_spatem()
| void adore::if_ROS::V2XTrafficLights::receive_spatem |
( |
dsrc_v2_spatem_pdu_descriptions::SPATEM |
msg | ) |
|
|
inline |
◆ secondsToChange()
| virtual double adore::if_ROS::V2XTrafficLights::secondsToChange |
( |
double |
vehicle_second_of_year, |
|
|
double |
spat_second_of_year, |
|
|
double |
validility_time |
|
) |
| |
|
inlinevirtual |
◆ _logging_frequency
| float adore::if_ROS::V2XTrafficLights::_logging_frequency |
|
private |
◆ _use_system_time
| bool adore::if_ROS::V2XTrafficLights::_use_system_time |
|
private |
◆ _utm_zone_
| int adore::if_ROS::V2XTrafficLights::_utm_zone_ |
|
private |
◆ connection_state_publisher
| ros::Publisher adore::if_ROS::V2XTrafficLights::connection_state_publisher |
|
private |
◆ intersectionID_to_map_
| MAPEMContainer adore::if_ROS::V2XTrafficLights::intersectionID_to_map_ |
|
private |
◆ mapem_subscriber_
| ros::Subscriber adore::if_ROS::V2XTrafficLights::mapem_subscriber_ |
|
private |
◆ odom_subscriber_
| ros::Subscriber adore::if_ROS::V2XTrafficLights::odom_subscriber_ |
|
private |
◆ received_mapem_layers_
| std::unordered_map<int, std::vector<int> > adore::if_ROS::V2XTrafficLights::received_mapem_layers_ |
|
private |
◆ spatem_subscriber_
| ros::Subscriber adore::if_ROS::V2XTrafficLights::spatem_subscriber_ |
|
private |
◆ t_
| double adore::if_ROS::V2XTrafficLights::t_ |
|
private |
◆ X_
| double adore::if_ROS::V2XTrafficLights::X_ |
|
private |
◆ Y_
| double adore::if_ROS::V2XTrafficLights::Y_ |
|
private |
◆ Z_
| double adore::if_ROS::V2XTrafficLights::Z_ |
|
private |
The documentation for this class was generated from the following file: