|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <string>#include <map>#include <adore/fun/setpointrequest.h>#include <adore/fun/terminalrequest.h>#include <adore/mad/occupancycylinder.h>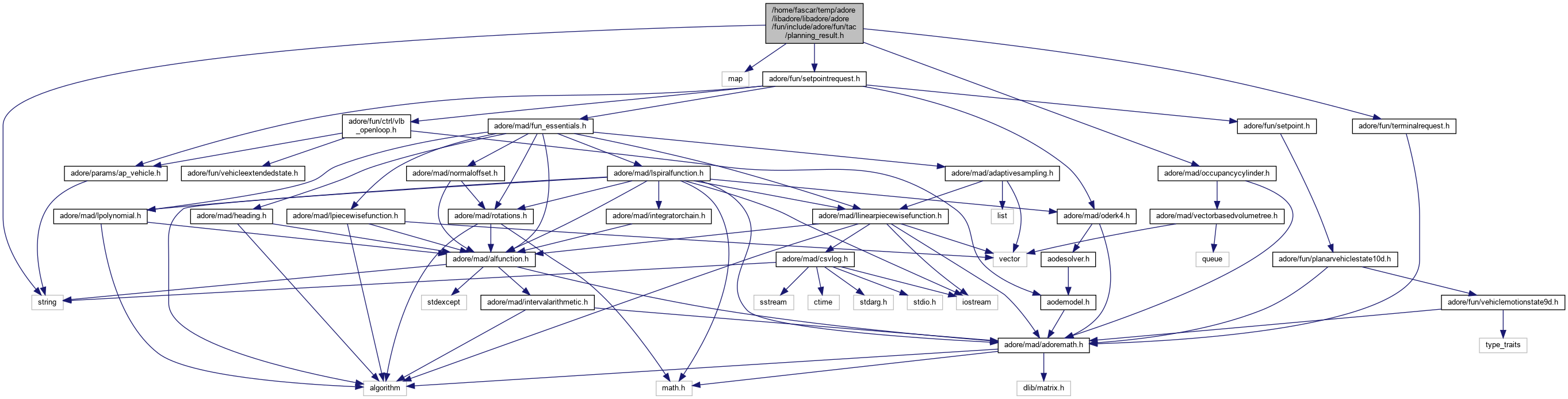

Go to the source code of this file.
Classes | |
| struct | adore::fun::PlanningResult |
Namespaces | |
| adore | |
| adore::fun | |
Typedefs | |
| typedef std::vector< PlanningResult > | adore::fun::TPlanningResultSet |