#include <lanegeometryconverter.h>
|
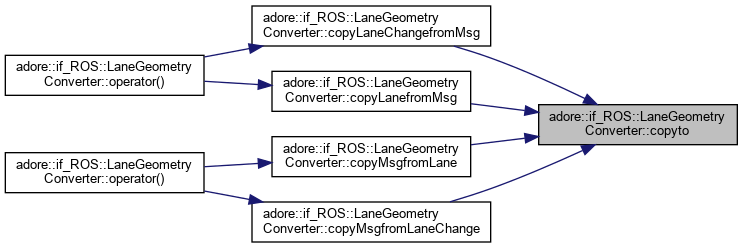
| void | operator() (adore_if_ros_msg::LaneGeometryConstPtr msg, adore::env::BorderBased::CombinedLaneGeometry &combined) |
| |
| void | copyLanefromMsg (std::shared_ptr< adore::env::BorderBased::LaneGeometryDataProxy > lane, adore_if_ros_msg::LaneFollowingGeometry const &msg) |
| |
| void | copyLaneChangefromMsg (std::shared_ptr< adore::env::BorderBased::LaneChangeDataProxy > lane, adore_if_ros_msg::LaneChangeGeometry const &msg) |
| |
| adore_if_ros_msg::LaneGeometry | operator() (const adore::env::BorderBased::CombinedLaneGeometry &combined) |
| |
| void | copyMsgfromLane (adore_if_ros_msg::LaneFollowingGeometry &msg, std::shared_ptr< adore::env::BorderBased::LaneGeometryDataProxy > lane) |
| |
| void | copyMsgfromLaneChange (adore_if_ros_msg::LaneChangeGeometry &msg, std::shared_ptr< adore::env::BorderBased::LaneChangeDataProxy > lane) |
| |
| void | operator() (adore_if_ros_msg::LinearPiecewiseFunction3dConstPtr msg, adore::mad::function_type_xyz &lpf) |
| |
| adore_if_ros_msg::LinearPiecewiseFunction3d | operator() (const adore::mad::function_type_xyz &lpf) |
| |
| void | copyto (adore::mad::function_type_xyz &lpf, adore_if_ros_msg::LinearPiecewiseFunction3d const &msg) |
| | copy of adore_if_ros_msg::LinearPieceWiseFunction3d to lpf function type xyz More...
|
| |
| void | copyto (adore_if_ros_msg::LinearPiecewiseFunction3d &msg, adore::mad::function_type_xyz const &lpf) |
| | copy of lpf function type xyz to adore_if_ros_msg::LinearPieceWiseFunction3d More...
|
| |
| void | copyto (adore::mad::function_type_scalar &lpf, adore_if_ros_msg::LinearPiecewiseFunction1d const &msg) |
| | copy of adore_if_ros_msg::LinearPieceWiseFunction1d to lpf function type scalar More...
|
| |
| void | copyto (adore_if_ros_msg::LinearPiecewiseFunction1d &msg, adore::mad::function_type_scalar const &lpf) |
| | copy of lpf function type scalar to adore_if_ros_msg::LinearPieceWiseFunction1d More...
|
| |
| void | copyto (adore::mad::function_type2d &lpf, adore_if_ros_msg::LinearPiecewiseFunction2d const &msg) |
| | copy of adore_if_ros_msg::LinearPieceWiseFunction1d to lpf function type scalar More...
|
| |
| void | copyto (adore_if_ros_msg::LinearPiecewiseFunction2d &msg, adore::mad::function_type2d const &lpf) |
| | copy of lpf function type scalar to adore_if_ros_msg::LinearPieceWiseFunction1d More...
|
| |
◆ copyLaneChangefromMsg()
◆ copyLanefromMsg()
◆ copyMsgfromLane()
◆ copyMsgfromLaneChange()
◆ copyto() [1/6]
| void adore::if_ROS::LaneGeometryConverter::copyto |
( |
adore::mad::function_type2d & |
lpf, |
|
|
adore_if_ros_msg::LinearPiecewiseFunction2d const & |
msg |
|
) |
| |
|
inline |
copy of adore_if_ros_msg::LinearPieceWiseFunction1d to lpf function type scalar
- Parameters
-
◆ copyto() [2/6]
copy of adore_if_ros_msg::LinearPieceWiseFunction1d to lpf function type scalar
- Parameters
-
◆ copyto() [3/6]
| void adore::if_ROS::LaneGeometryConverter::copyto |
( |
adore::mad::function_type_xyz & |
lpf, |
|
|
adore_if_ros_msg::LinearPiecewiseFunction3d const & |
msg |
|
) |
| |
|
inline |
copy of adore_if_ros_msg::LinearPieceWiseFunction3d to lpf function type xyz
- Parameters
-
◆ copyto() [4/6]
copy of lpf function type scalar to adore_if_ros_msg::LinearPieceWiseFunction1d
- Parameters
-
◆ copyto() [5/6]
| void adore::if_ROS::LaneGeometryConverter::copyto |
( |
adore_if_ros_msg::LinearPiecewiseFunction2d & |
msg, |
|
|
adore::mad::function_type2d const & |
lpf |
|
) |
| |
|
inline |
copy of lpf function type scalar to adore_if_ros_msg::LinearPieceWiseFunction1d
- Parameters
-
◆ copyto() [6/6]
| void adore::if_ROS::LaneGeometryConverter::copyto |
( |
adore_if_ros_msg::LinearPiecewiseFunction3d & |
msg, |
|
|
adore::mad::function_type_xyz const & |
lpf |
|
) |
| |
|
inline |
copy of lpf function type xyz to adore_if_ros_msg::LinearPieceWiseFunction3d
- Parameters
-
◆ operator()() [1/4]
Conversion of adore_if_ros_msg::LaneGeometry to adore::env::BorderBased::LaneGeometry
◆ operator()() [2/4]
| void adore::if_ROS::LaneGeometryConverter::operator() |
( |
adore_if_ros_msg::LinearPiecewiseFunction3dConstPtr |
msg, |
|
|
adore::mad::function_type_xyz & |
lpf |
|
) |
| |
|
inline |
Conversion of adore_if_ros_msg::LinearPieceWiseFunction3d to lpf function type xyz
◆ operator()() [3/4]
Conversion of adore::env::BorderBased::LaneGeometry to adore_if_ros_msg::LaneGeometry
◆ operator()() [4/4]
Conversion of lpf function type xyz to adore_if_ros_msg::LaneGeometry
The documentation for this struct was generated from the following file: