|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
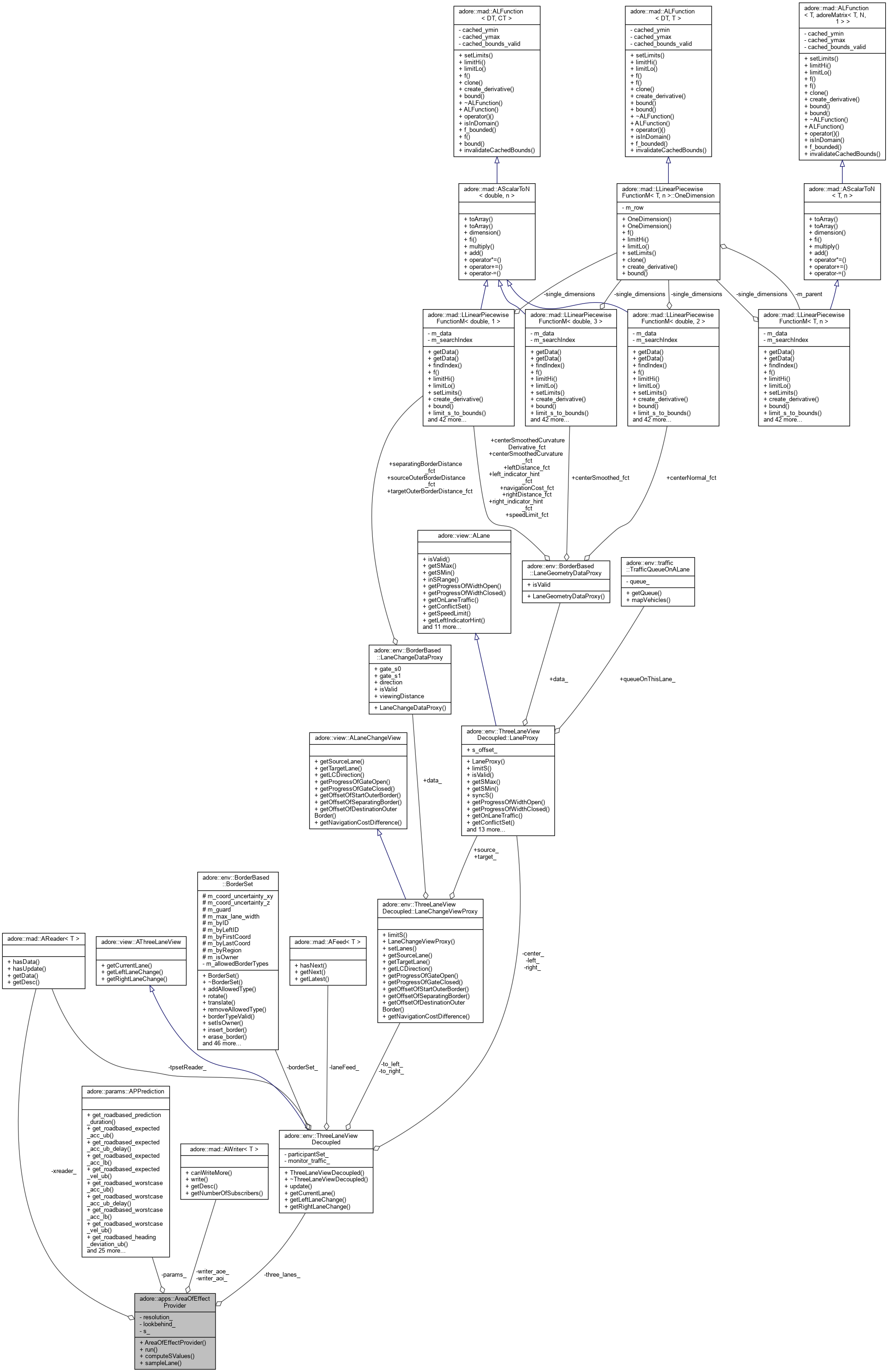
#include <area_of_effect_provider.h>
Public Member Functions | |
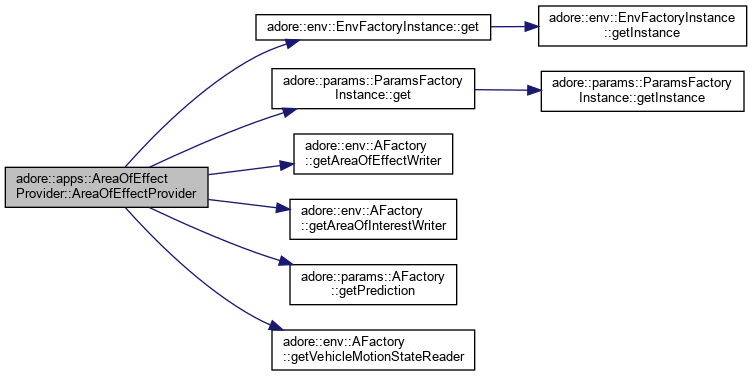
| AreaOfEffectProvider (double resolution=1.0) | |
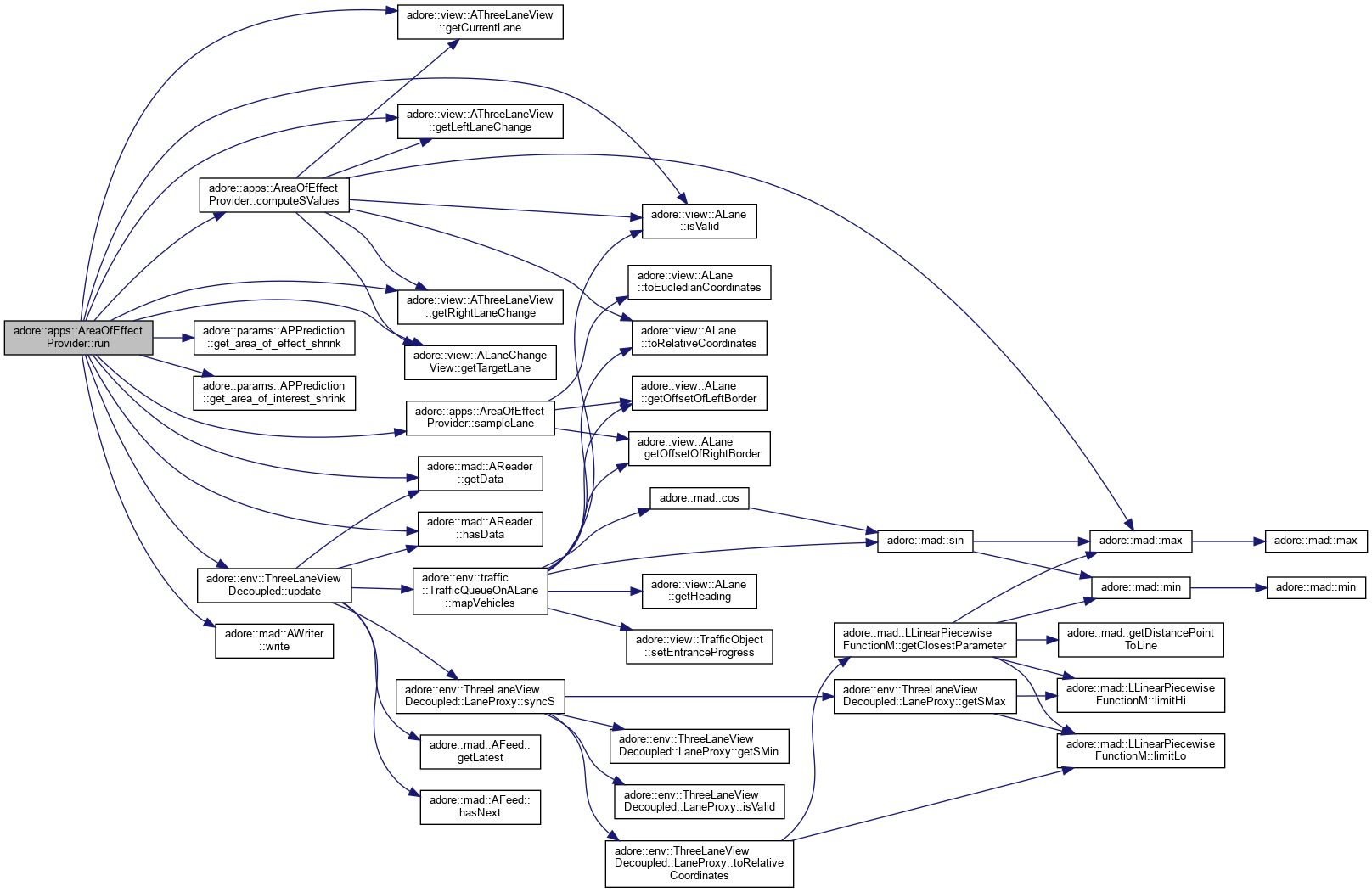
| void | run () |
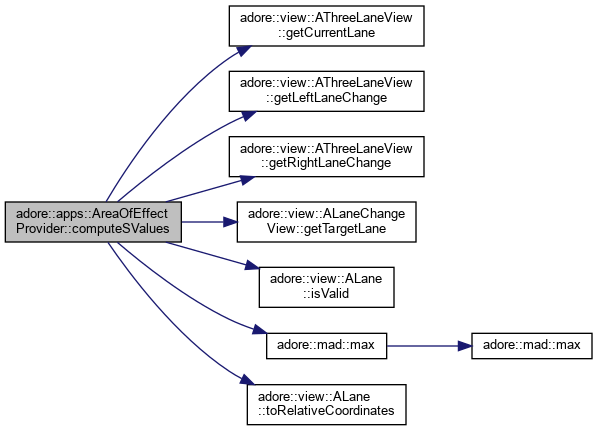
| void | computeSValues (adore::view::AThreeLaneView *view, double X0, double Y0) |
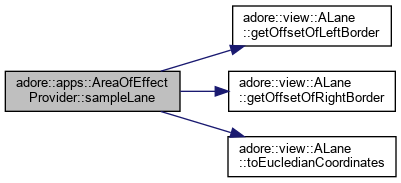
| void | sampleLane (adore::view::ALane *lane, double s0, double s1, adore::env::AreaOfEffect &area, double n_shrink_aoi=0.0) |
Private Types | |
| using | EnvFactory = adore::env::EnvFactoryInstance |
| using | ParamsFactory = adore::params::ParamsFactoryInstance |
Private Attributes | |
| adore::env::AFactory::TAreaOfEffectWriter * | writer_aoe_ |
| adore::env::AFactory::TAreaOfEffectWriter * | writer_aoi_ |
| adore::env::AFactory::TVehicleMotionStateReader * | xreader_ |
| adore::env::ThreeLaneViewDecoupled | three_lanes_ |
| adore::params::APPrediction * | params_ |
| double | resolution_ |
| double | lookbehind_ |
| std::vector< double > | s_ |
Provides boundary of area, which is currently reachable by vehicle: ThreeLaneView is processed to compute and publish outline.
|
private |
|
inline |
|
inline |

|
inline |

|
inline |

|
private |
|
private |
prediction parameters
|
private |
|
private |
s values encircling the area of effect in ccw direction
|
private |
lane-based representation of environment
|
private |
write output: aoe
|
private |
write output: aoi
|
private |
read vehicle state to crop lane view behind behind vehicle