|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <navigation.h>
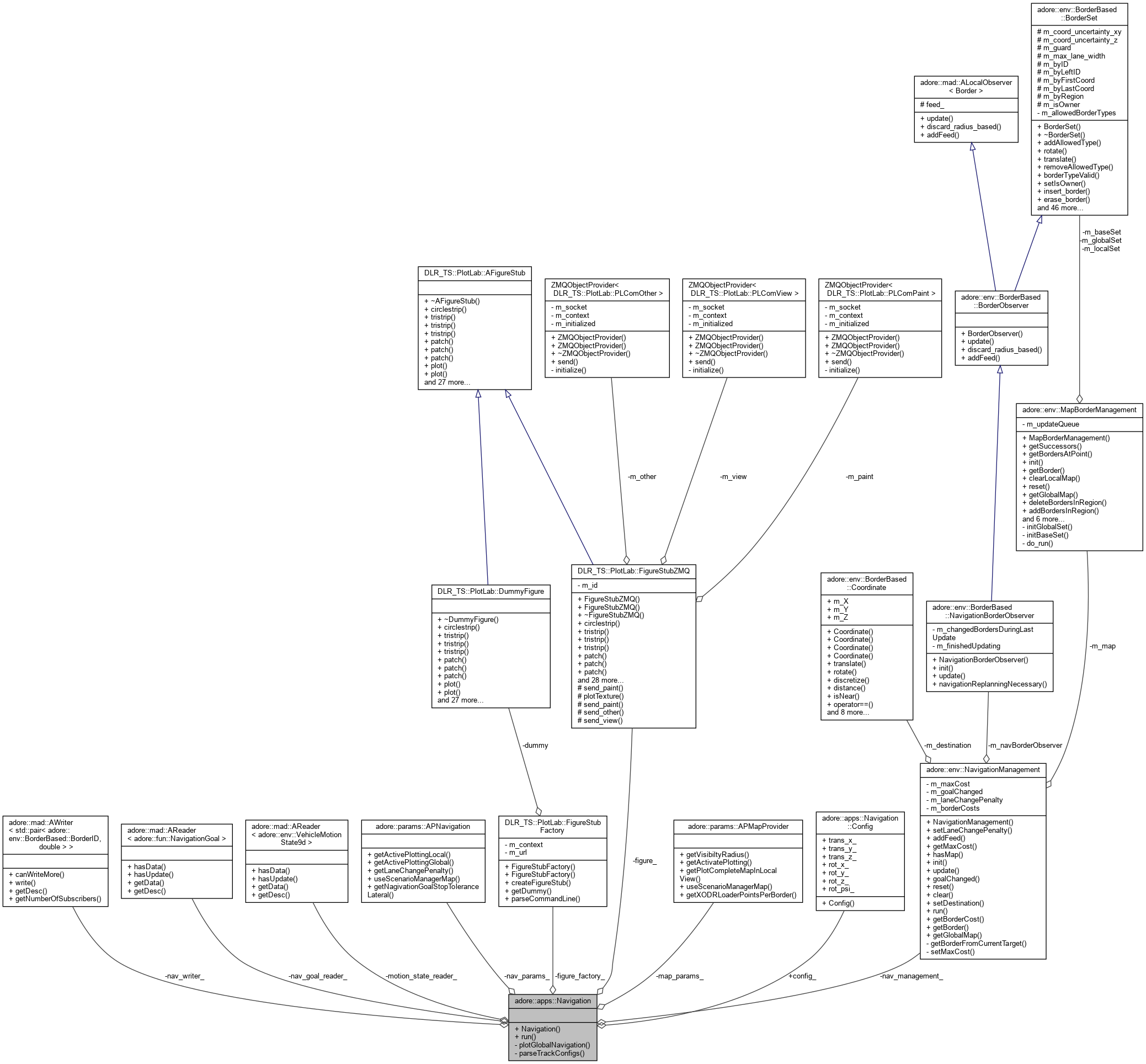
Classes | |
| struct | Config |
Public Member Functions | |
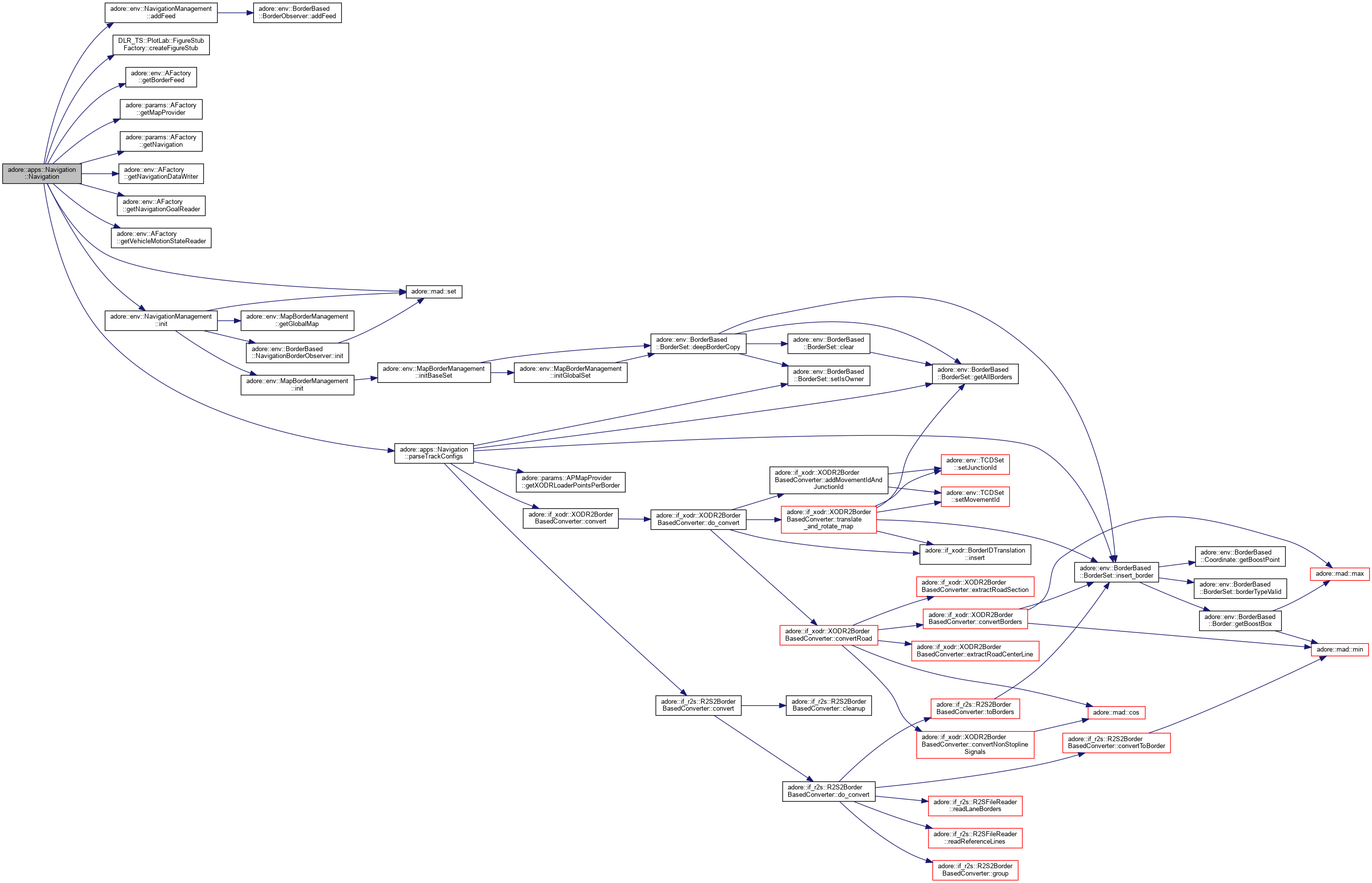
| Navigation (env::AFactory *env_factory, adore::params::AFactory *params_factory, std::string trackConfigs, Config config) | |
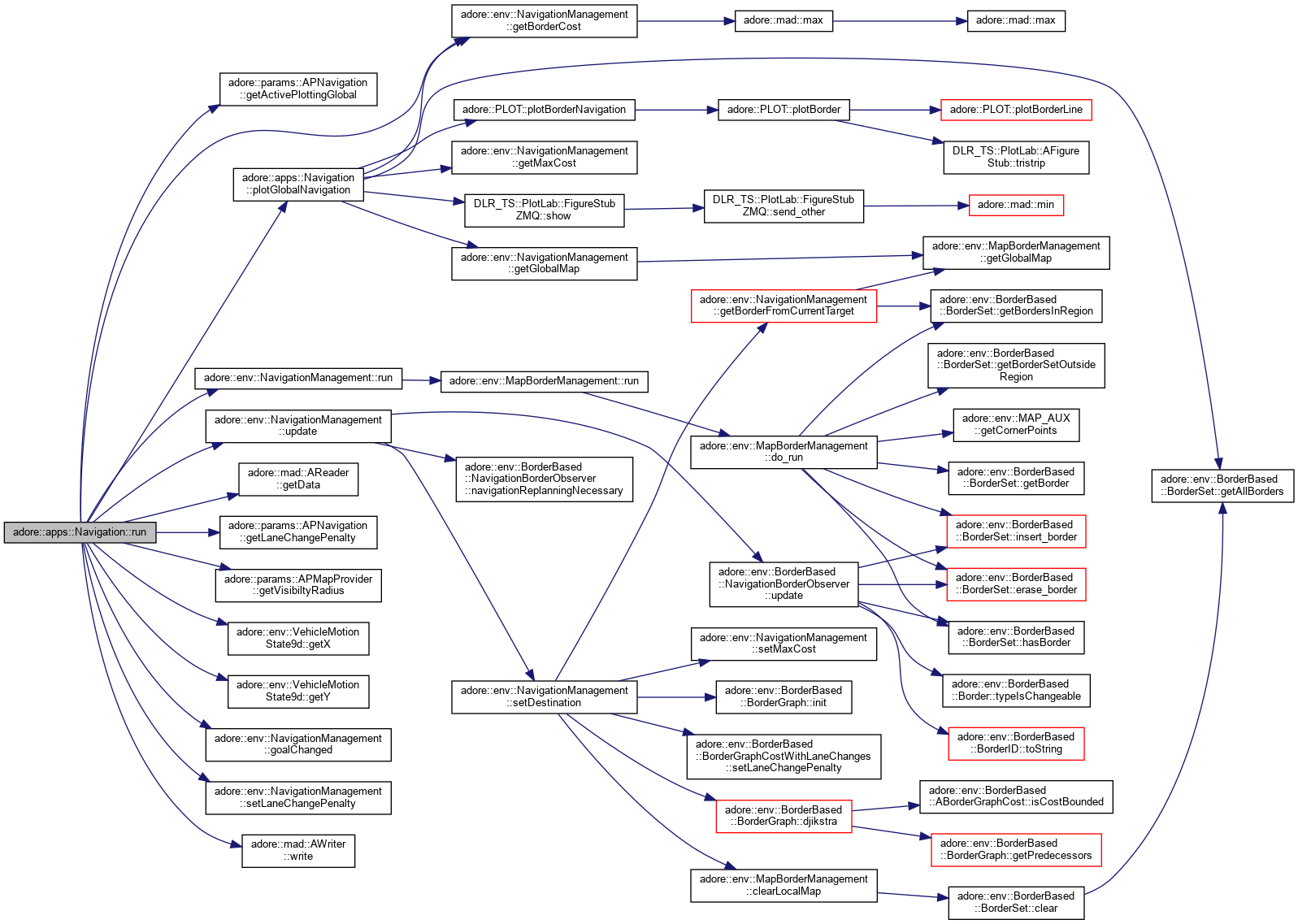
| virtual void | run () |
Public Attributes | |
| Config | config_ |
Private Member Functions | |
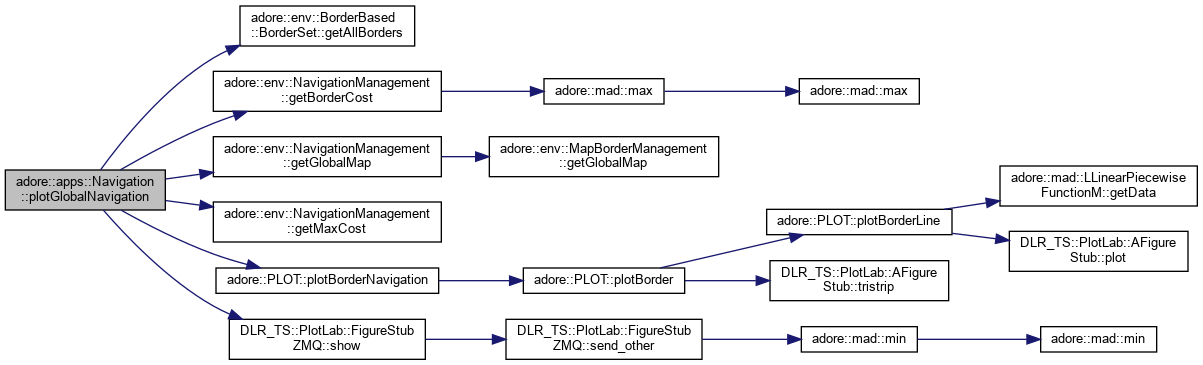
| void | plotGlobalNavigation () |
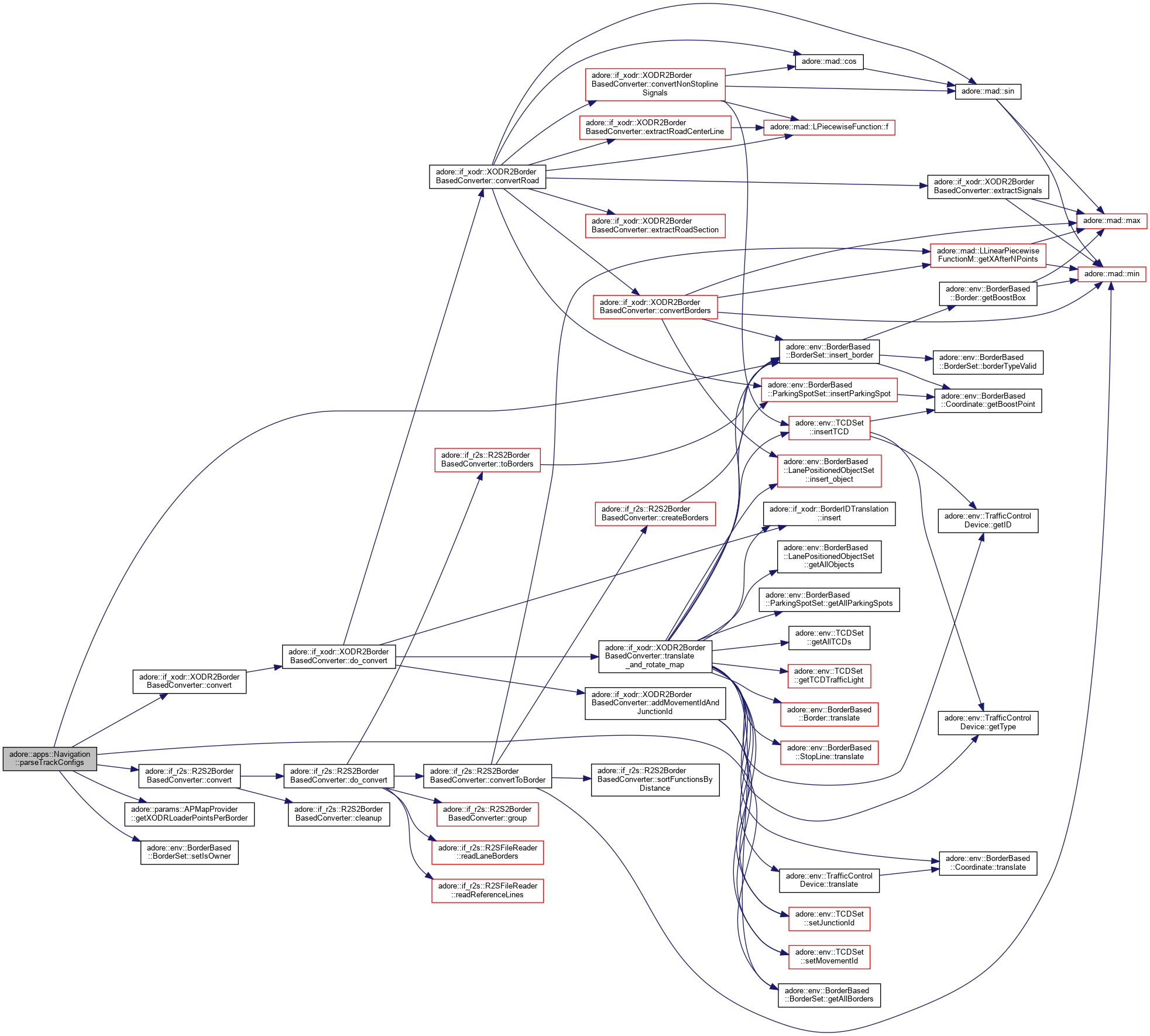
| void | parseTrackConfigs (std::string trackConfigs, env::BorderBased::BorderSet &targetSet) |
|
inline |
|
inlineprivate |

|
inlineprivate |

|
inlinevirtual |
| Config adore::apps::Navigation::config_ |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |