|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <basicsetpointrequestevaluators.h>
Public Member Functions | |
| SPRNavigationCostOnLane (adore::view::AThreeLaneView *threeLaneView, adore::params::APTacticalPlanner *params, int laneID) | |
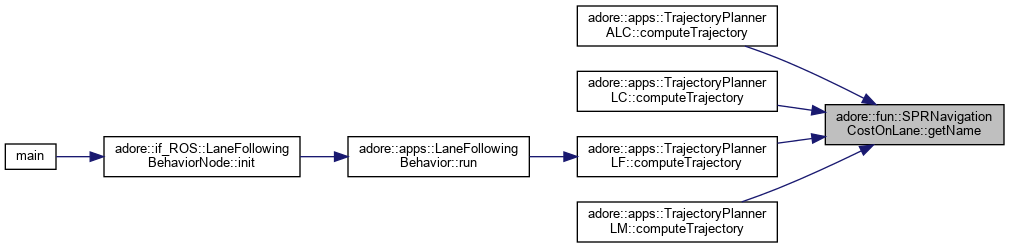
| virtual std::string | getName () const override |
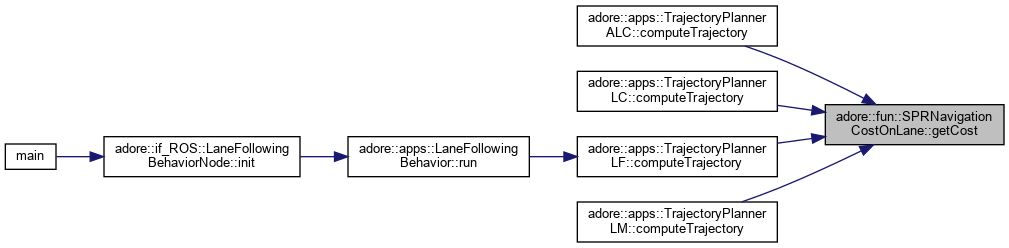
| virtual double | getCost (const adore::fun::SetPointRequest &spr) const override |
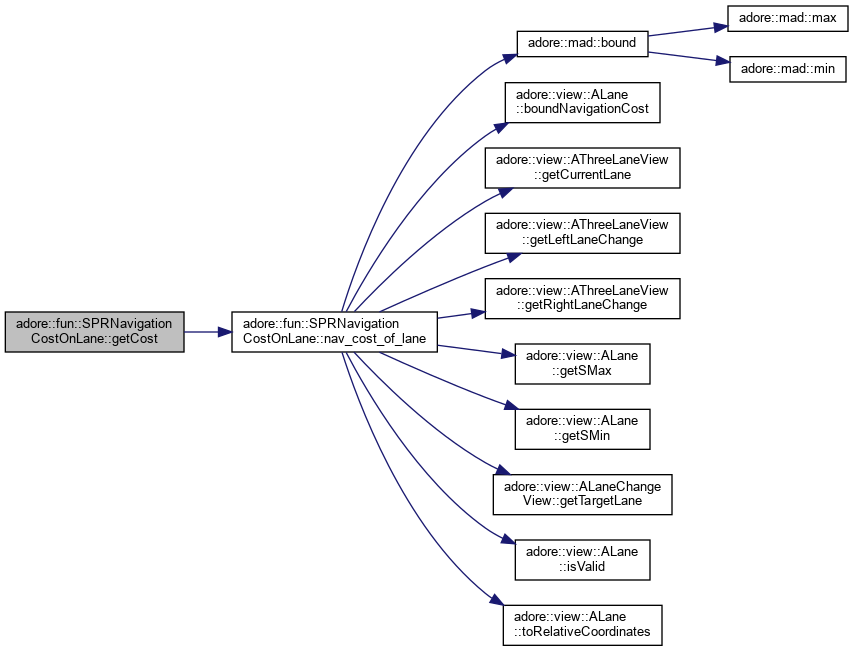
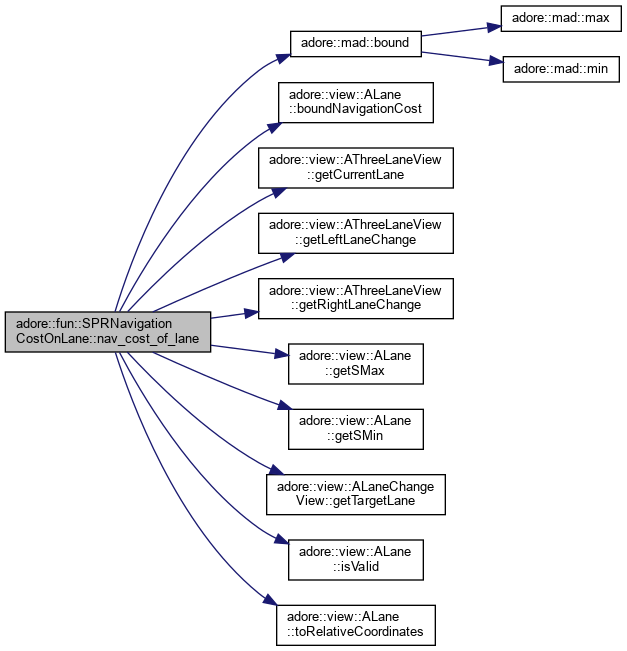
| double | nav_cost_of_lane (const adore::fun::SetPointRequest &spr, int laneid) const |
| minimum cost of given lane, independent of trajectory More... | |
Private Attributes | |
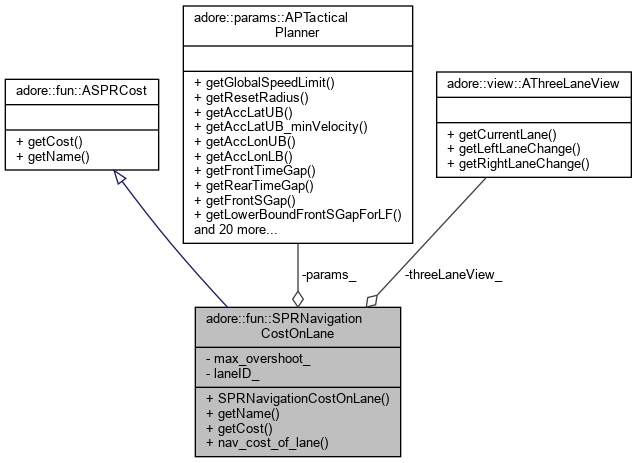
| adore::view::AThreeLaneView * | threeLaneView_ |
| adore::params::APTacticalPlanner * | params_ |
| double | max_overshoot_ |
| int | laneID_ |
Apply SPRNavigationCostOnLane to nominal manuever to investigate how good a lane is at navigating towards the goal.
|
inline |
|
inlineoverridevirtual |
Implements adore::fun::ASPRCost.
|
inlineoverridevirtual |
Implements adore::fun::ASPRCost.
|
inline |
minimum cost of given lane, independent of trajectory
| lane | index of lane: 0 current, -1 right, 1 left |

|
private |
|
private |
evaluate navigation cost correctly, even if vehicle has slightly surpassed navigation goal
|
private |
|
private |