#include <basicsetpointrequestevaluators.h>
Apply SPRNormalizedNavigationCost to nominal manuever to investigate how good it is at navigating towards the goal.
◆ SPRNormalizedNavigationCost()
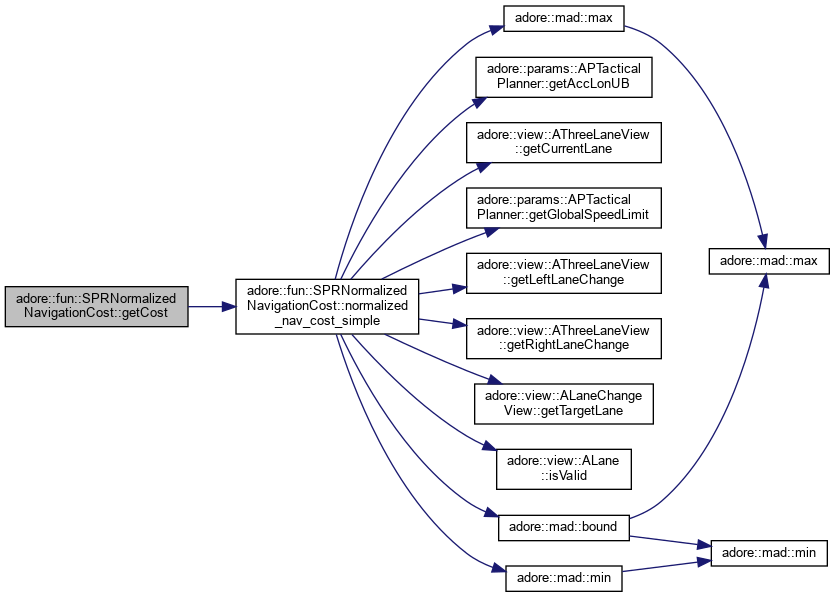
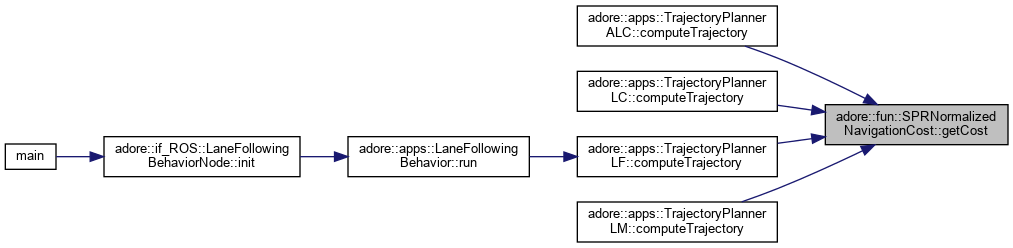
◆ getCost()
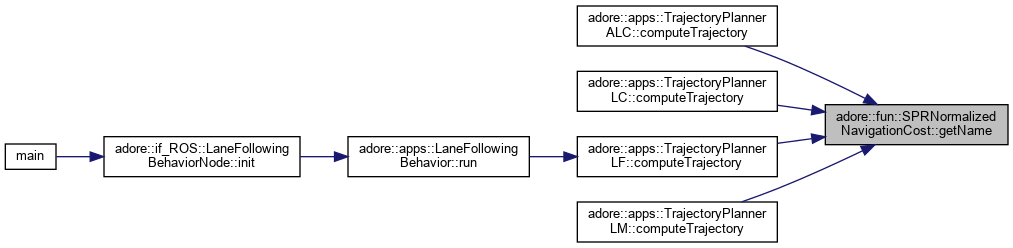
◆ getName()
| virtual std::string adore::fun::SPRNormalizedNavigationCost::getName |
( |
| ) |
const |
|
inlineoverridevirtual |
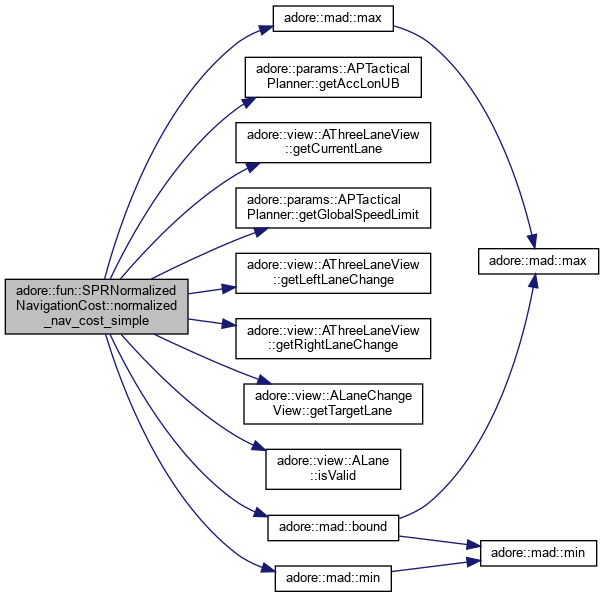
◆ normalized_nav_cost_simple()
| double adore::fun::SPRNormalizedNavigationCost::normalized_nav_cost_simple |
( |
const adore::fun::SetPointRequest & |
spr, |
|
|
int |
laneid |
|
) |
| const |
|
inline |
simplified version of normalized_nav_cost: lane is given
- Parameters
-
| lane | index of lane: 0 current, -1 right, 1 left |
◆ laneID_
| int adore::fun::SPRNormalizedNavigationCost::laneID_ |
|
private |
◆ max_overshoot_
| double adore::fun::SPRNormalizedNavigationCost::max_overshoot_ |
|
private |
evaluate navigation cost correctly, even if vehicle has slightly surpassed navigation goal
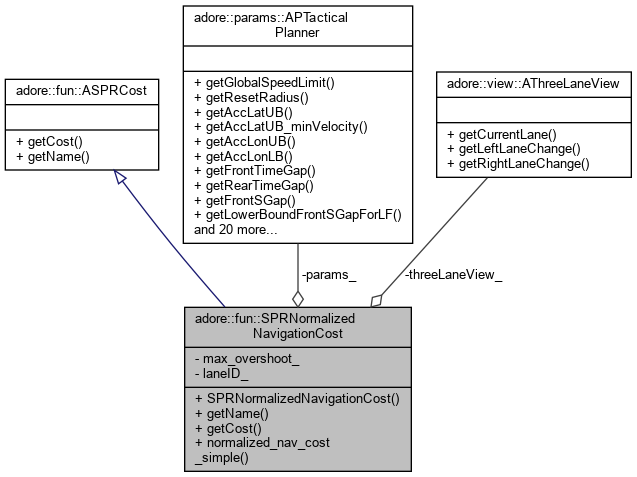
◆ params_
◆ threeLaneView_
The documentation for this class was generated from the following file: