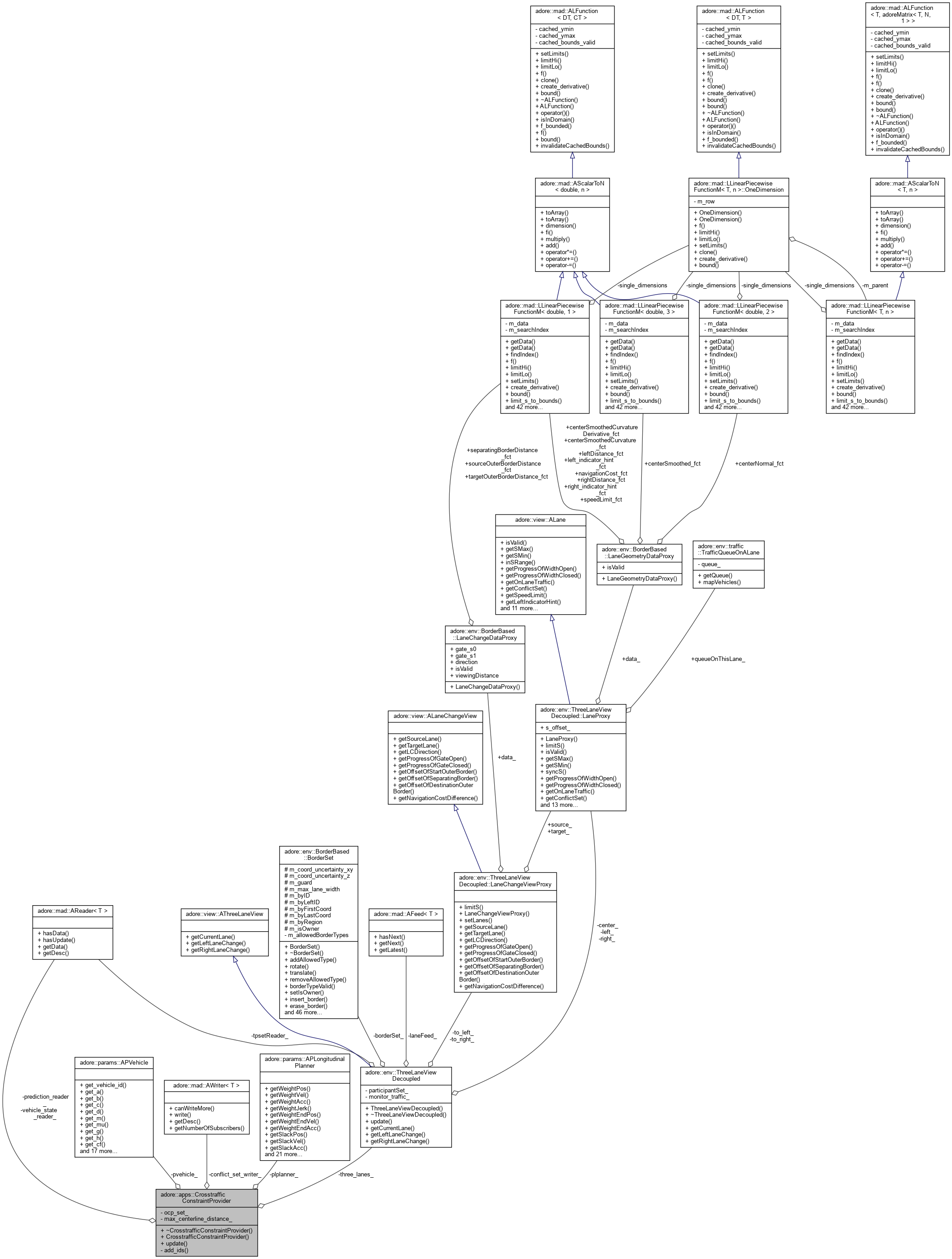
#include <crosstraffic_constraint_provider.h>
◆ ~CrosstrafficConstraintProvider()
| virtual adore::apps::CrosstrafficConstraintProvider::~CrosstrafficConstraintProvider |
( |
| ) |
|
|
inlinevirtual |
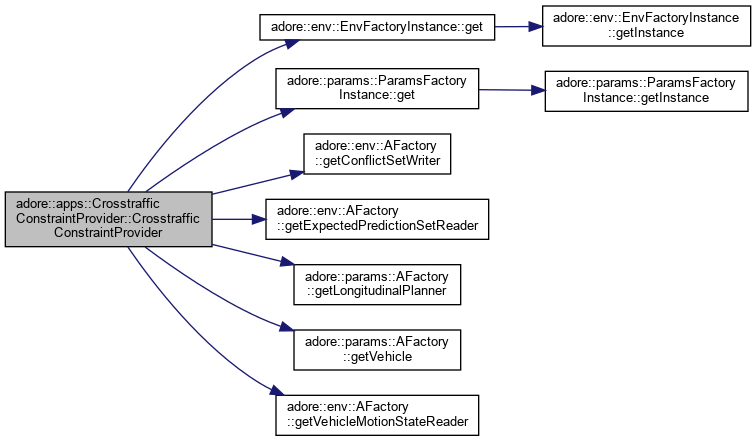
◆ CrosstrafficConstraintProvider()
| adore::apps::CrosstrafficConstraintProvider::CrosstrafficConstraintProvider |
( |
| ) |
|
|
inline |
◆ add_ids()
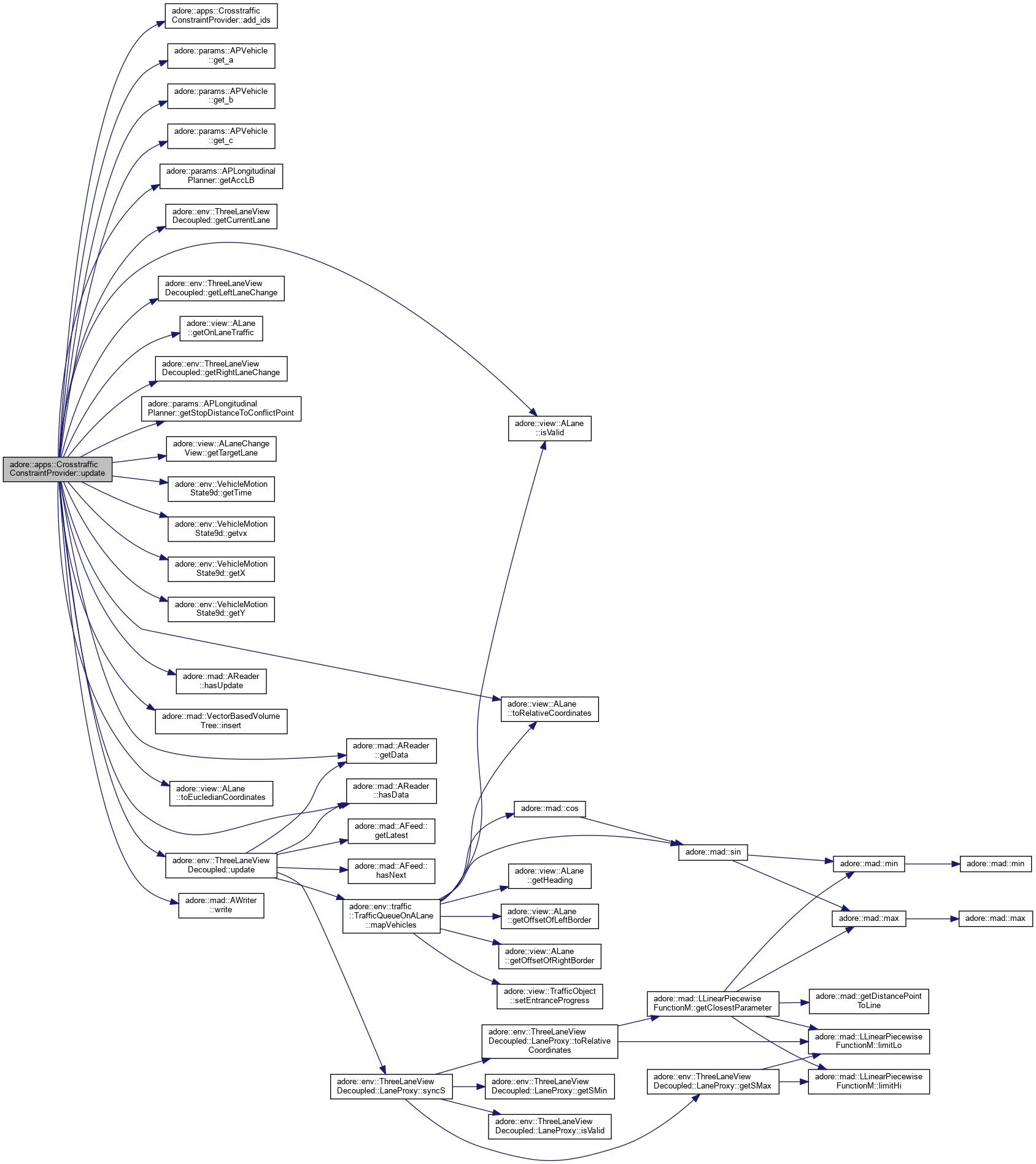
◆ update()
| virtual void adore::apps::CrosstrafficConstraintProvider::update |
( |
| ) |
|
|
inlinevirtual |
update data, views and recompute constraints
◆ conflict_set_writer_
◆ max_centerline_distance_
| double adore::apps::CrosstrafficConstraintProvider::max_centerline_distance_ |
|
private |
◆ ocp_set_
◆ plplanner_
◆ prediction_reader_
◆ pvehicle_
◆ three_lanes_
lane-based representation of environment
◆ vehicle_state_reader_
The documentation for this class was generated from the following file: