#include <feedbackcontroller.h>
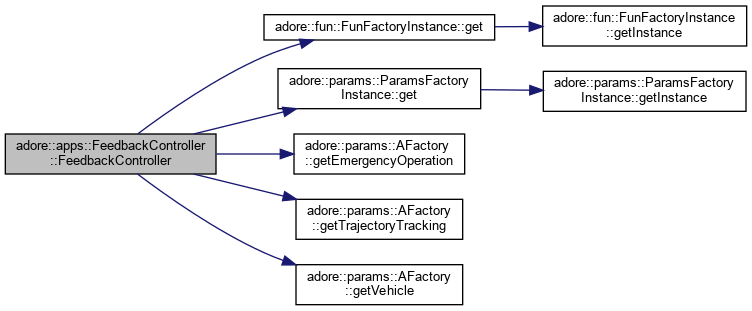
◆ FeedbackController()
| adore::apps::FeedbackController::FeedbackController |
( |
| ) |
|
|
inline |
◆ ~FeedbackController()
| virtual adore::apps::FeedbackController::~FeedbackController |
( |
| ) |
|
|
inlinevirtual |
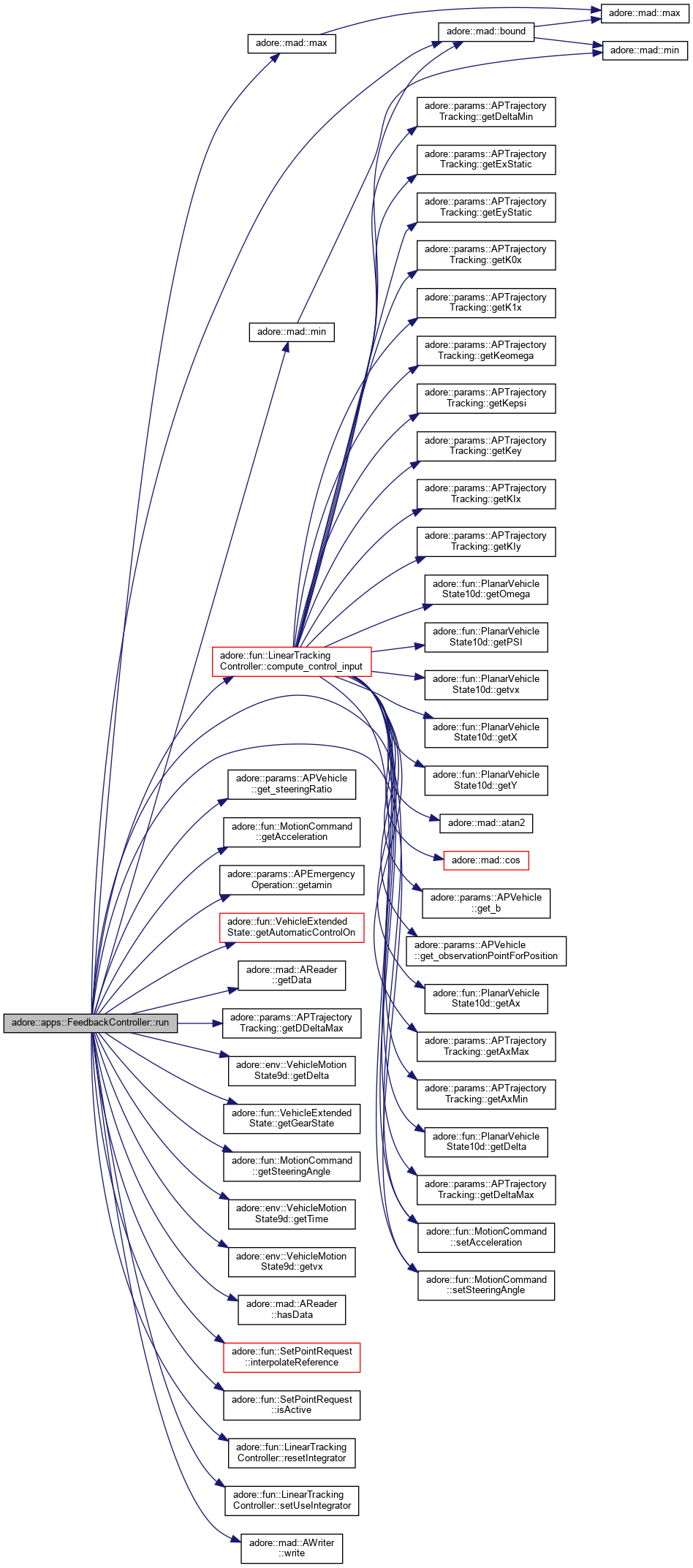
◆ run()
| void adore::apps::FeedbackController::run |
( |
| ) |
|
|
inline |
< delay before activation begins
<speed at which full steering rate is reached
<time after which full steering rate is reached
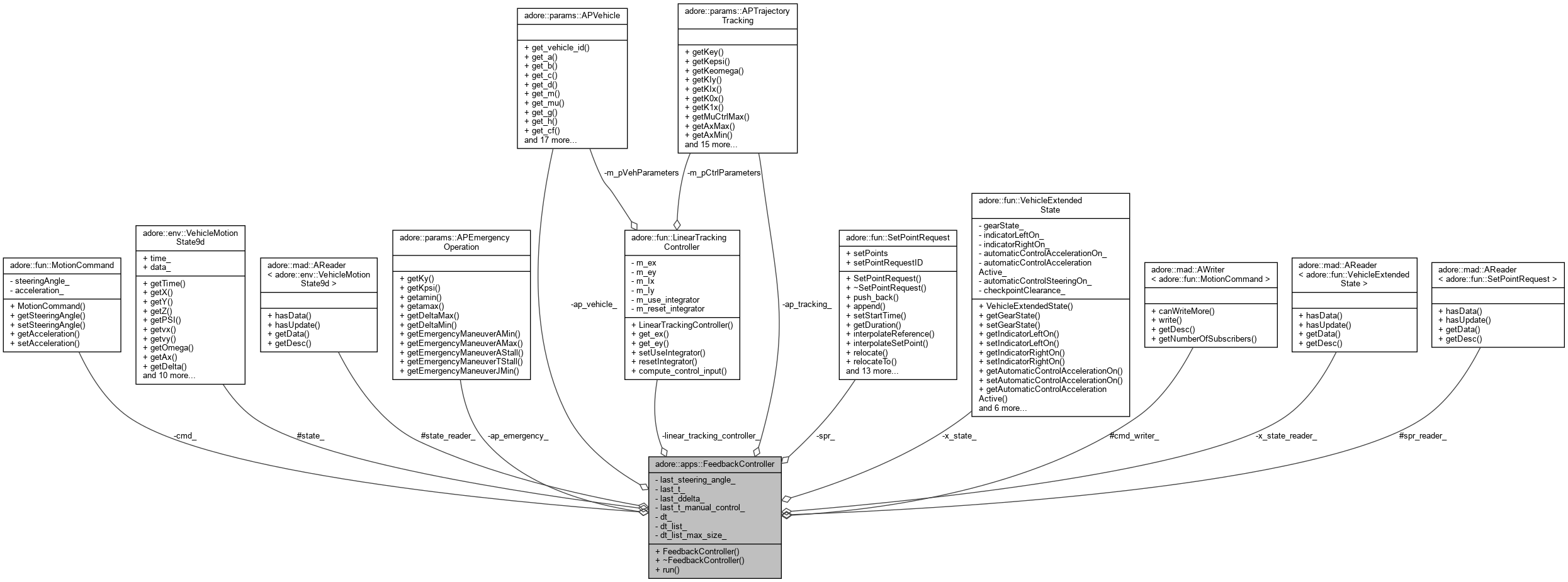
◆ ap_emergency_
◆ ap_tracking_
◆ ap_vehicle_
◆ cmd_
◆ cmd_writer_
◆ dt_
| double adore::apps::FeedbackController::dt_ |
|
private |
◆ dt_list_
| std::list<double> adore::apps::FeedbackController::dt_list_ |
|
private |
◆ dt_list_max_size_
| int adore::apps::FeedbackController::dt_list_max_size_ |
|
private |
◆ last_ddelta_
| double adore::apps::FeedbackController::last_ddelta_ |
|
private |
◆ last_steering_angle_
| double adore::apps::FeedbackController::last_steering_angle_ |
|
private |
◆ last_t_
| double adore::apps::FeedbackController::last_t_ |
|
private |
◆ last_t_manual_control_
| double adore::apps::FeedbackController::last_t_manual_control_ |
|
private |
◆ linear_tracking_controller_
◆ spr_
◆ spr_reader_
◆ state_
◆ state_reader_
◆ x_state_
◆ x_state_reader_
The documentation for this class was generated from the following file: