|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
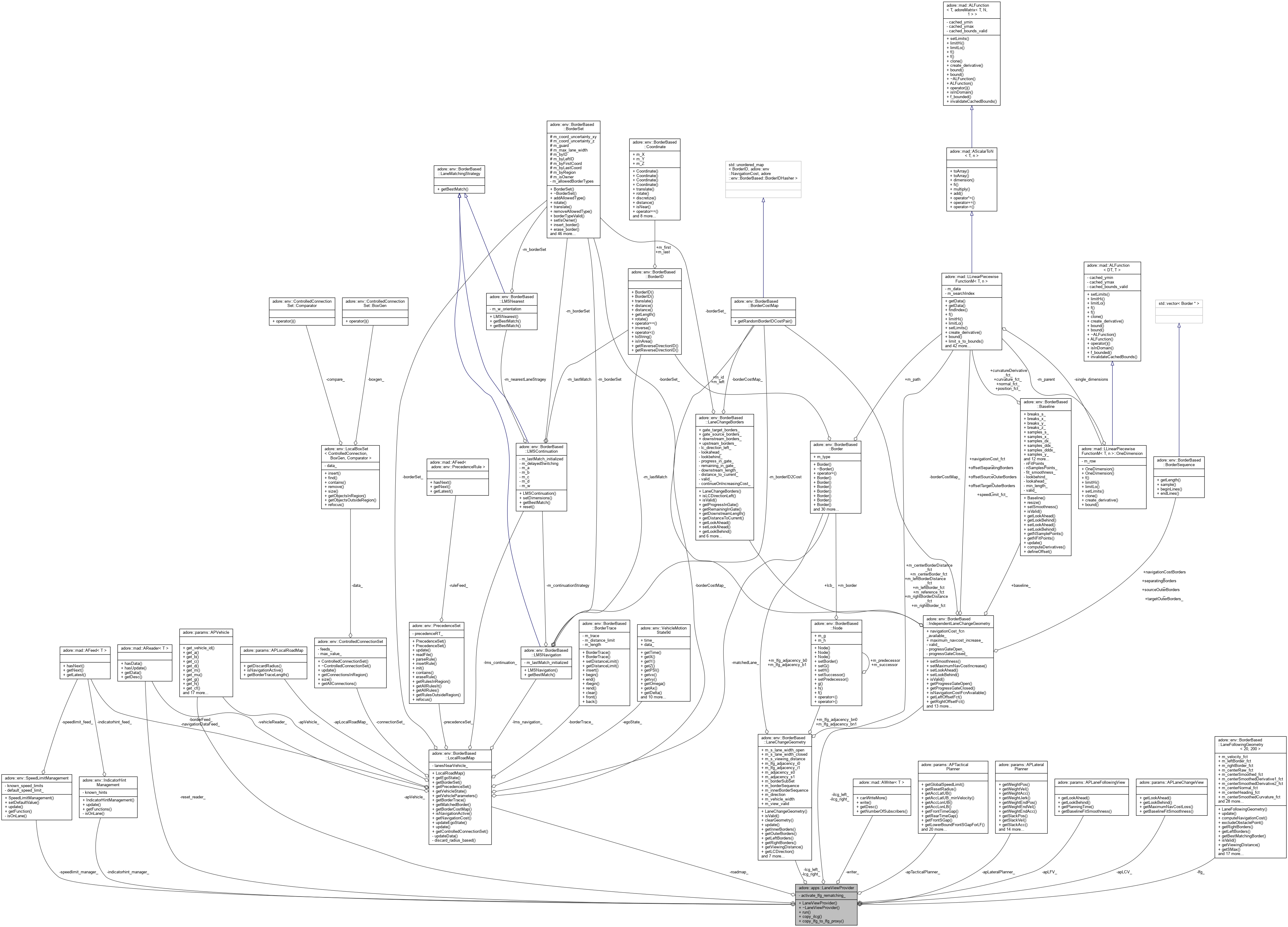
A node which computes lanefollowing and lanechange geometry and provides the results to subsequent modules. More...
#include <lane_view_provider.h>
Public Member Functions | |
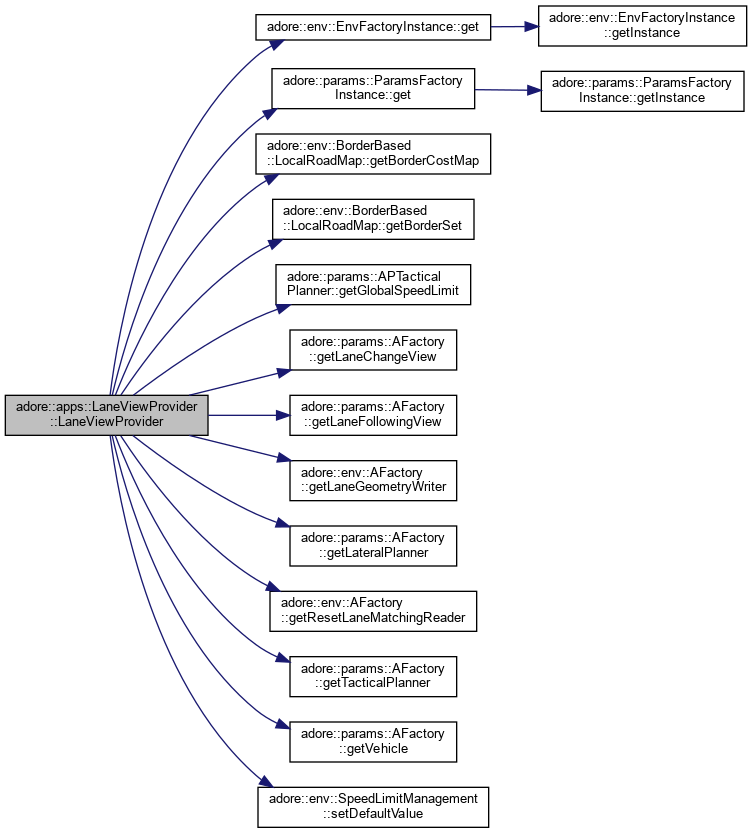
| LaneViewProvider () | |
| virtual | ~LaneViewProvider () |
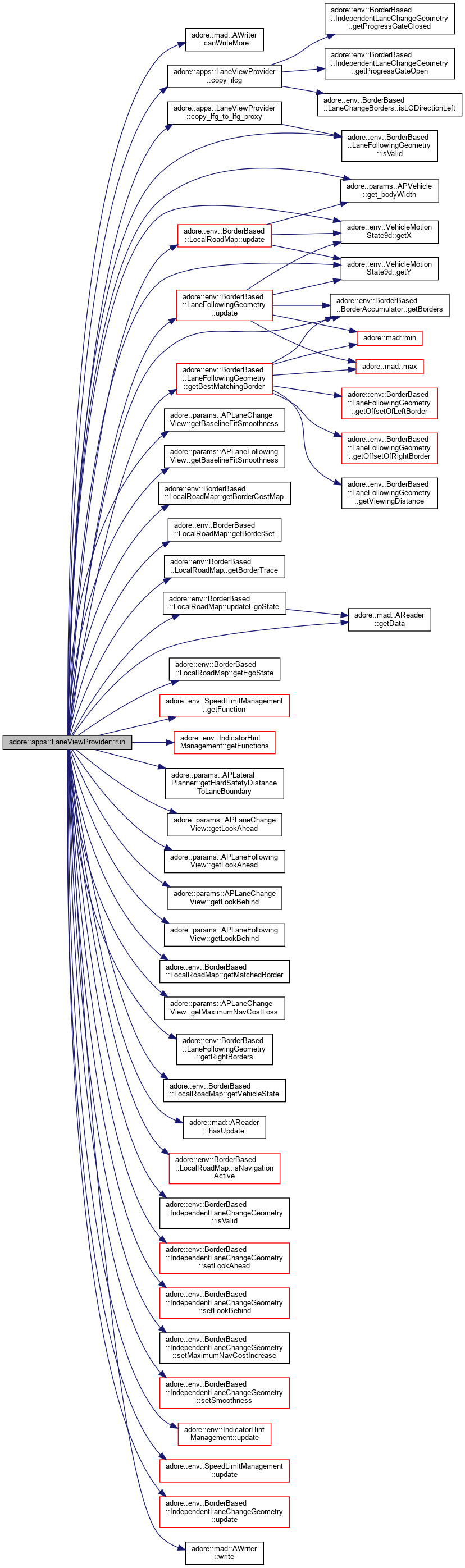
| void | run () |
| update data, views and recompute maneuver More... | |
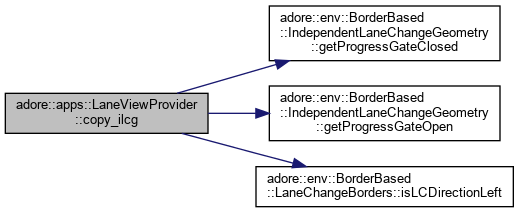
| void | copy_ilcg (std::shared_ptr< adore::env::BorderBased::LaneGeometryDataProxy > target_geometry, std::shared_ptr< adore::env::BorderBased::LaneChangeDataProxy > target_lcdata, adore::env::BorderBased::IndependentLaneChangeGeometry *lane) |
| void | copy_lfg_to_lfg_proxy (std::shared_ptr< adore::env::BorderBased::LaneGeometryDataProxy > target, adore::env::BorderBased::LaneFollowingGeometry< 20, 200 > const &source) |
A node which computes lanefollowing and lanechange geometry and provides the results to subsequent modules.
|
inline |
|
inlinevirtual |
|
inline |

|
inline |


|
inline |
update data, views and recompute maneuver

|
private |
|
private |
info for switching lanes
|
private |
parameters LCV
|
private |
parameters LFV
|
private |
just for global SpeedLimit param
|
private |
Parameters for vehicle width
|
private |
lc-geometry with its own baseline
|
private |
lc-geometry with its own baseline
|
private |
|
private |
object, which constructs lane change geometry (left) from local road-map
|
private |
object, which constructs lane change geometry (right) from local road-map
|
private |
object, which constructs lane following geometry from local road-map
|
private |
Reads required reset of lane matching
|
private |
data set with local road-map
|
private |
|
private |