#include <platoon_view_provider.h>
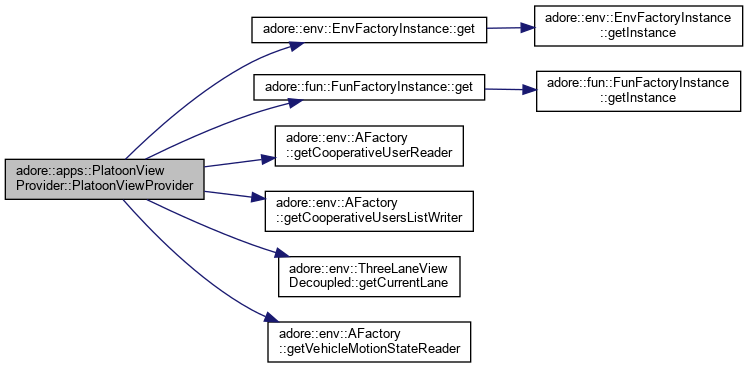
◆ PlatoonViewProvider()
| adore::apps::PlatoonViewProvider::PlatoonViewProvider |
( |
| ) |
|
|
inline |
◆ ~PlatoonViewProvider()
| virtual adore::apps::PlatoonViewProvider::~PlatoonViewProvider |
( |
| ) |
|
|
inlinevirtual |
◆ getIndex()
| int adore::apps::PlatoonViewProvider::getIndex |
( |
std::vector< int > |
v, |
|
|
int |
K |
|
) |
| |
|
inlineprivate |
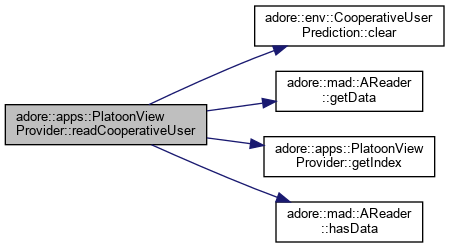
◆ readCooperativeUser()
| void adore::apps::PlatoonViewProvider::readCooperativeUser |
( |
| ) |
|
|
inlineprivate |
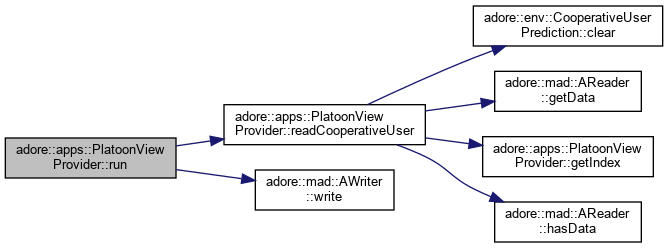
◆ run()
| void adore::apps::PlatoonViewProvider::run |
( |
| ) |
|
|
inline |
update data, views and recompute maneuver
◆ automationLevel
| int adore::apps::PlatoonViewProvider::automationLevel |
|
private |
◆ connectionSet_
current rule set for controlled connections
◆ connectionsOnLane_
◆ cooperativeUser
◆ cooperativeUserList_writer
◆ cooperativeUserPrediction_reader
◆ index
| std::vector<int> adore::apps::PlatoonViewProvider::index |
|
private |
◆ localCooperativeUserList
◆ three_lanes_
lane-based representation of environment
◆ vehiclePlatooningCapability
| bool adore::apps::PlatoonViewProvider::vehiclePlatooningCapability |
|
private |
◆ x_
◆ xreader_
The documentation for this class was generated from the following file: