|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <lanechangeconstraintsandreferences.h>
Public Member Functions | |
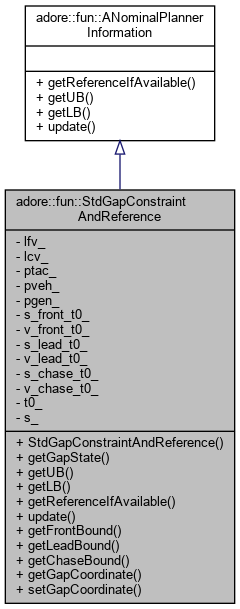
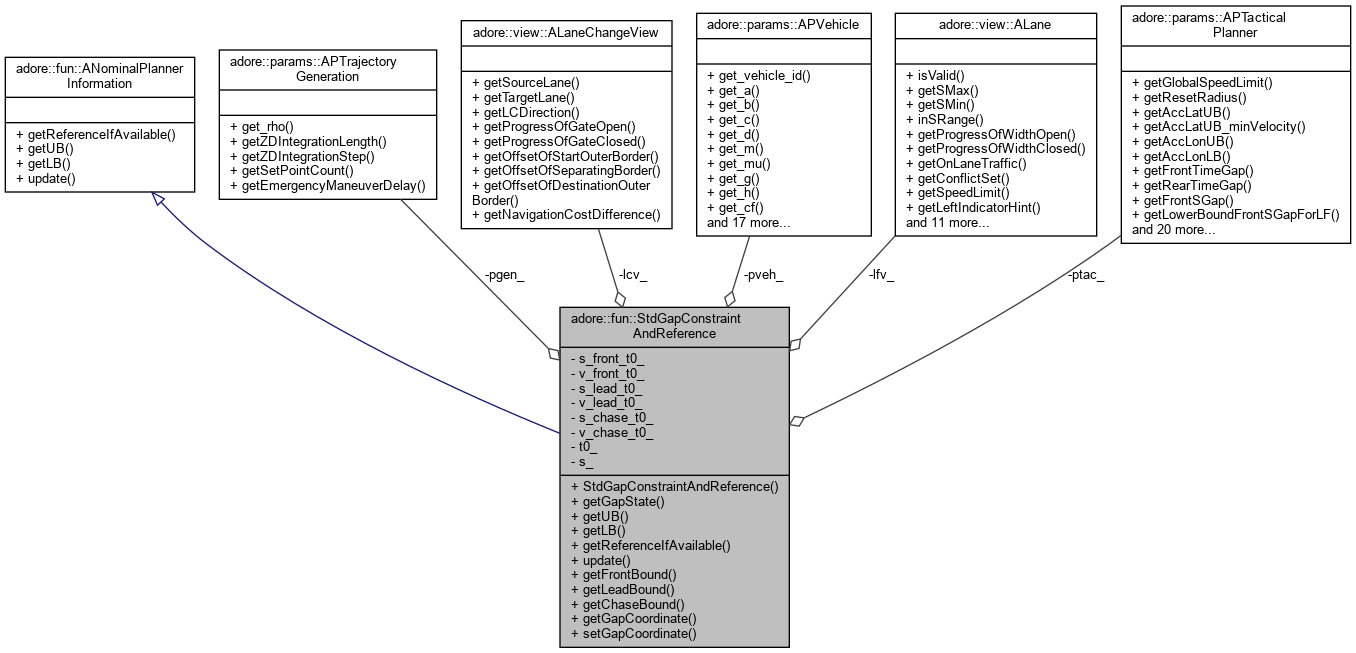
| StdGapConstraintAndReference (adore::view::ALane *lfv, adore::view::ALaneChangeView *lcv, const adore::params::APVehicle *pveh, const adore::params::APTacticalPlanner *ptac, const adore::params::APTrajectoryGeneration *pgen) | |
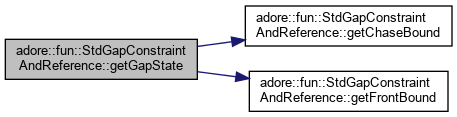
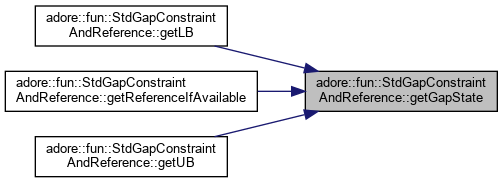
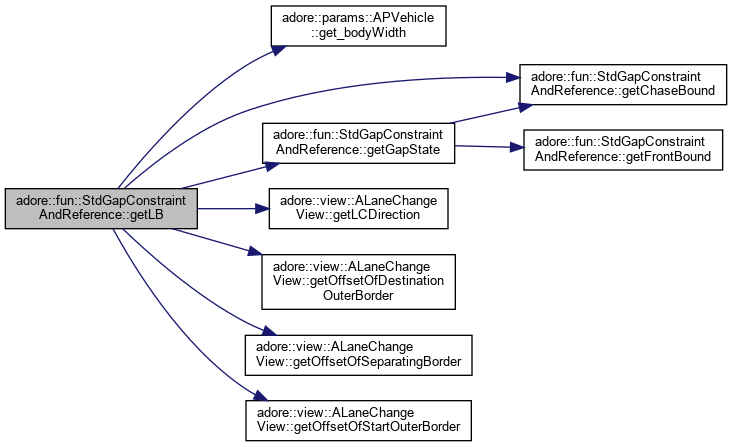
| gapState | getGapState (double t) const |
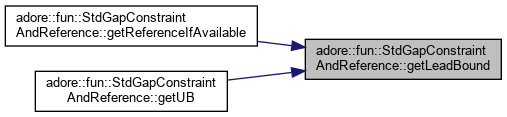
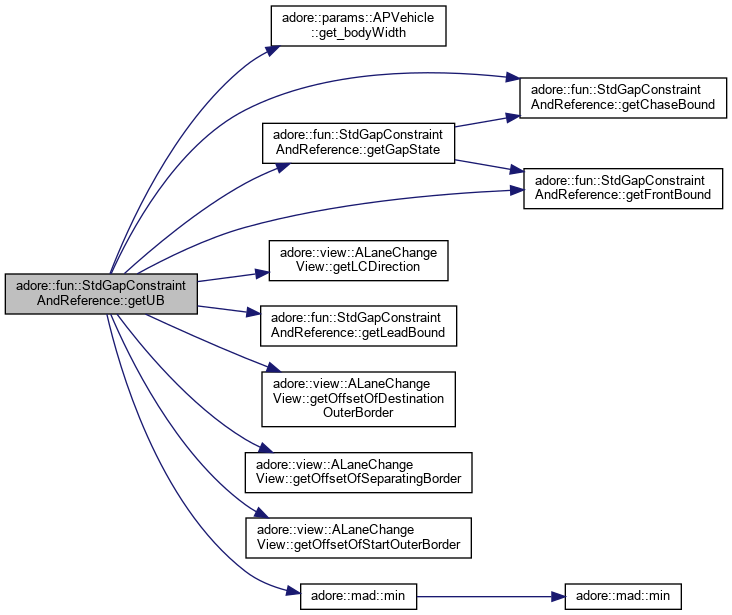
| virtual double | getUB (int dim, int der, double t, double s, double ds) const override |
| getUB returns the upper bound for the offset's der's derivative in dimension dim More... | |
| virtual double | getLB (int dim, int der, double t, double s, double ds) const override |
| getLB returns the lower bound for the offset's der's derivative in dimension dim More... | |
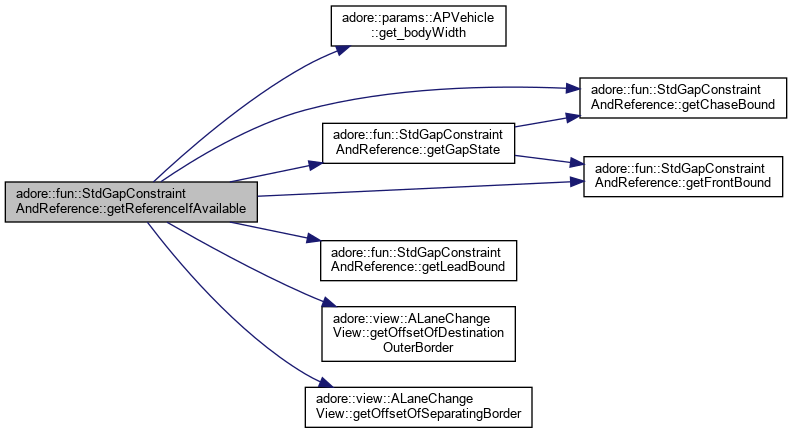
| virtual bool | getReferenceIfAvailable (int dim, int der, double t, double s, double ds, double &ref) const override |
| getReferenceIfAvailable returns true if the reference for the dimension and derivative is available and then writes the reference into ref More... | |
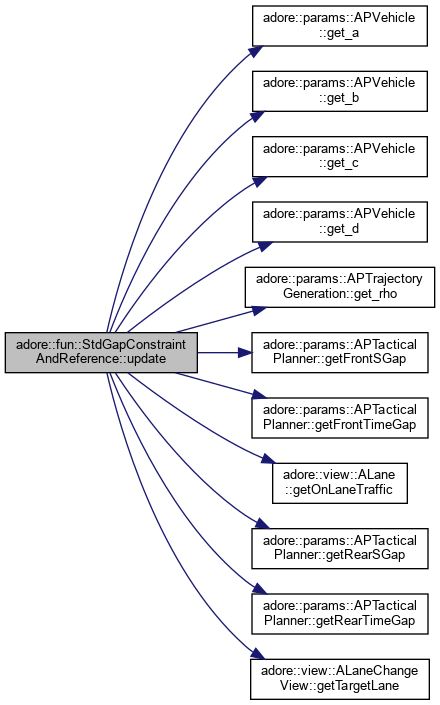
| virtual void | update (double t0, double s0, double ds0) override |
| update update all constraints and references More... | |
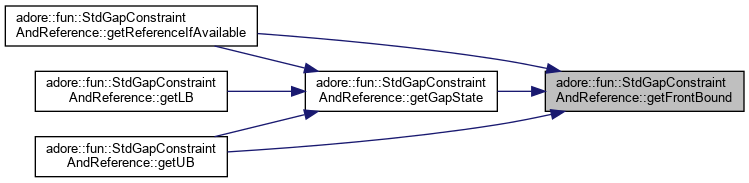
| double | getFrontBound (double t) const |
| double | getLeadBound (double t) const |
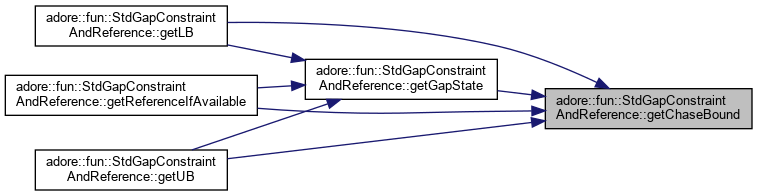
| double | getChaseBound (double t) const |
| double | getGapCoordinate () const |
| void | setGapCoordinate (double s) |
Private Types | |
| enum | gapState { gapOpen , gapOpening , gapClosed } |
Private Attributes | |
| adore::view::ALane * | lfv_ |
| adore::view::ALaneChangeView * | lcv_ |
| const adore::params::APTacticalPlanner * | ptac_ |
| const adore::params::APVehicle * | pveh_ |
| const adore::params::APTrajectoryGeneration * | pgen_ |
| double | s_front_t0_ |
| double | v_front_t0_ |
| double | s_lead_t0_ |
| double | v_lead_t0_ |
| double | s_chase_t0_ |
| double | v_chase_t0_ |
| double | t0_ |
| double | s_ |
Constraints and references to change lanes into a gap defined by s-coordinate
|
private |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inlineoverridevirtual |
getLB returns the lower bound for the offset's der's derivative in dimension dim
Implements adore::fun::ANominalPlannerInformation.
|
inline |
|
inlineoverridevirtual |
getReferenceIfAvailable returns true if the reference for the dimension and derivative is available and then writes the reference into ref
Implements adore::fun::ANominalPlannerInformation.
|
inlineoverridevirtual |
getUB returns the upper bound for the offset's der's derivative in dimension dim
Implements adore::fun::ANominalPlannerInformation.
|
inline |
|
inlineoverridevirtual |
update update all constraints and references
Implements adore::fun::ANominalPlannerInformation.
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
s-coordinate to specify the gap
|
private |
chase constraint position at t0
|
private |
front constraint position at t0
|
private |
lead constraint position at t0
|
private |
last update time
|
private |
chase constraint velocity at t0
|
private |
front constraint velocity at t0
|
private |
lead constraint velocity at t0