|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
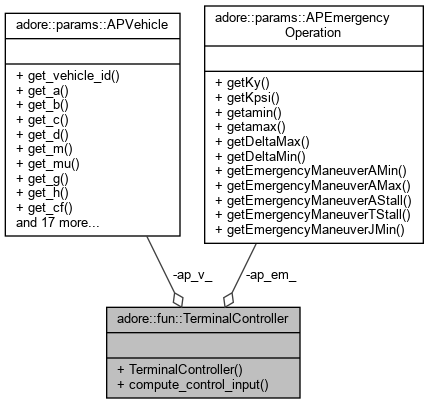
#include <terminal_controller.h>
Public Member Functions | |
| TerminalController (adore::params::APEmergencyOperation *ap_em, adore::params::APVehicle *ap_v) | |
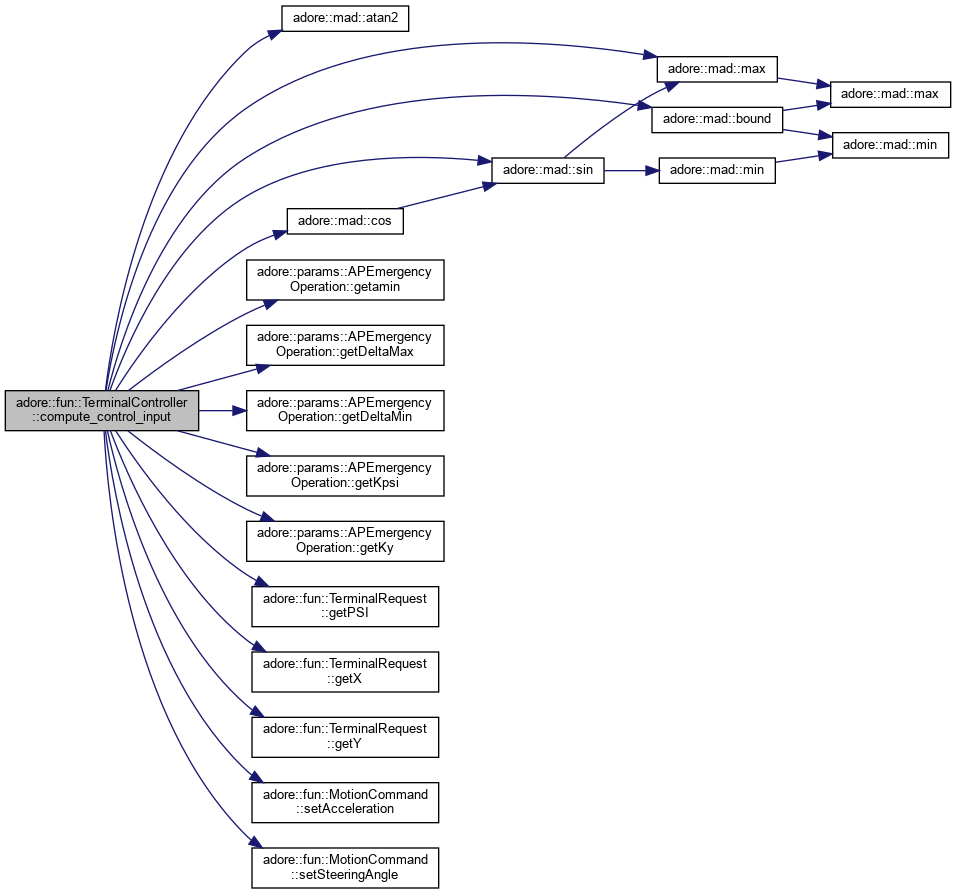
| void | compute_control_input (const VehicleMotionState9d &x, const TerminalRequest &term, MotionCommand &u) |
Private Attributes | |
| adore::params::APEmergencyOperation * | ap_em_ |
| adore::params::APVehicle * | ap_v_ |
A simple controller for emergency braking and lateral stabilization during emergency braking. Main goal of the controller is to stop the vehicle as soon as possible, therefore a high deceleration value is applied. The controller is provided with a reference in the form of a straight line, around which to stabilize the vehicle during braking.
|
inline |
Constructor
| ap_em | emergency operation parameters |
| ap_v | vehicle parameters |
|
inline |
computation of controller
| x | vehicle state |
| term | terminal request: straight line around which to stabilize during braking |
| u | vehicle control input, output of the function |
|
private |
|
private |