|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
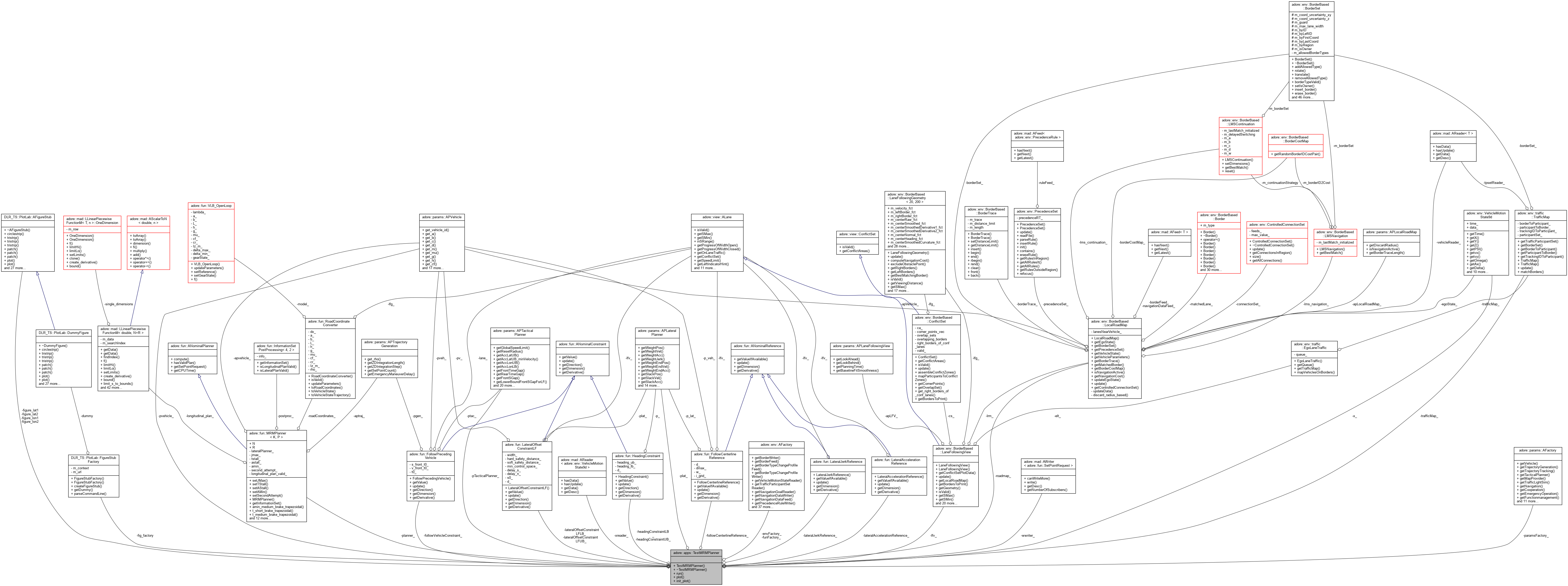
test bench implementation for minimum risk maneuver planner More...
#include <test_mrm_planner.h>
Public Member Functions | |
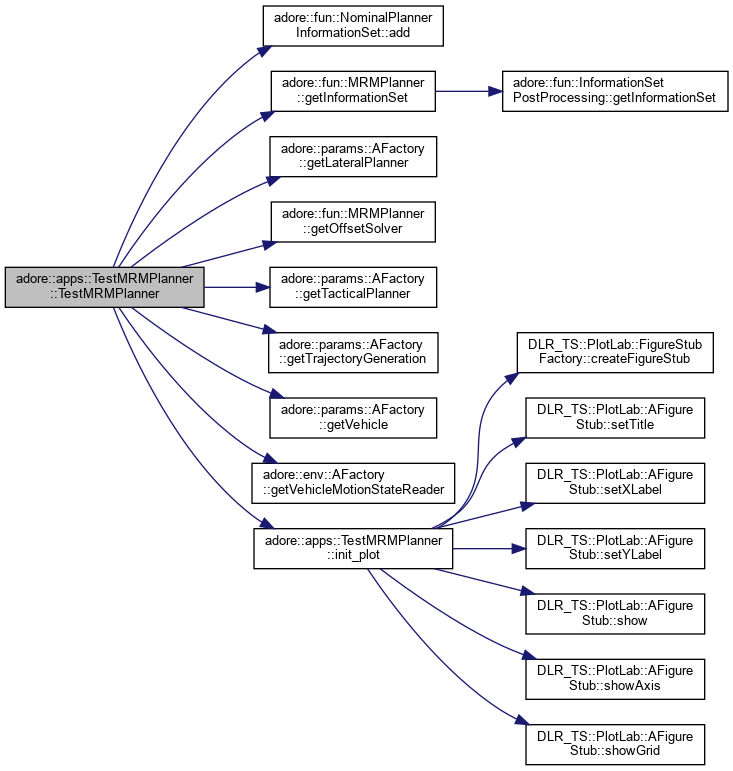
| TestMRMPlanner (adore::env::AFactory *envFactory, adore::fun::AFactory *funFactory, adore::params::AFactory *PARAMS_Factory) | |
| ~TestMRMPlanner () | |
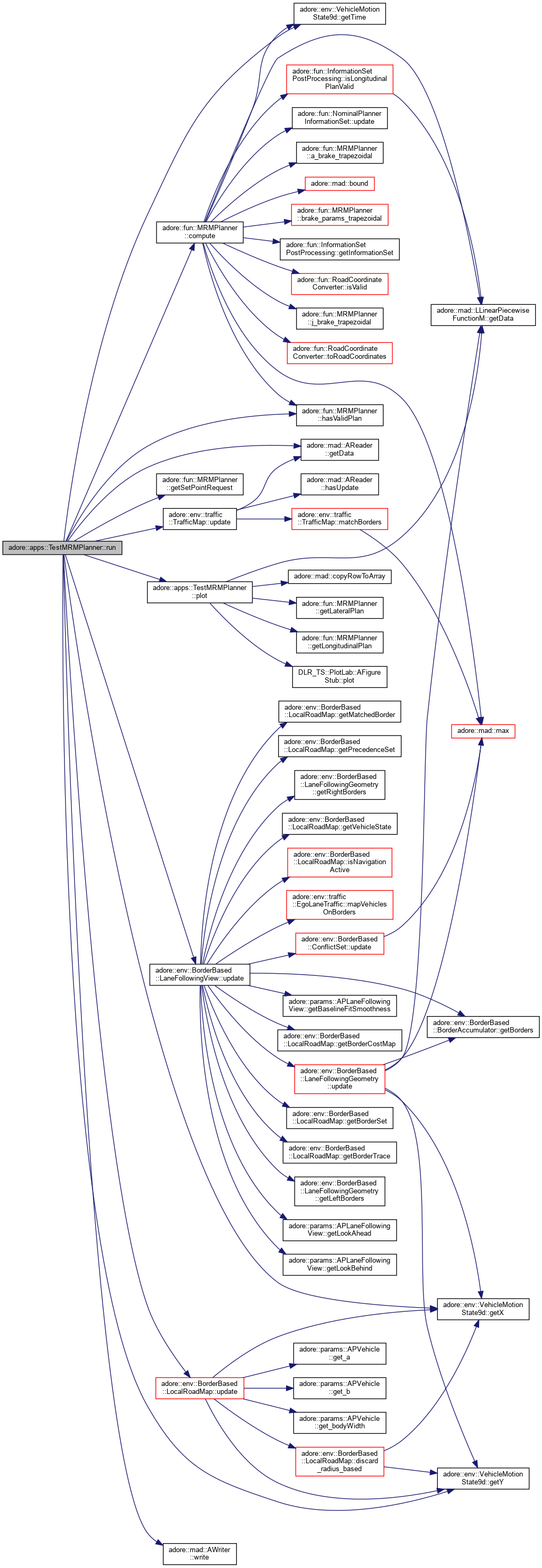
| void | run () |
| update function of the trajectory planner More... | |
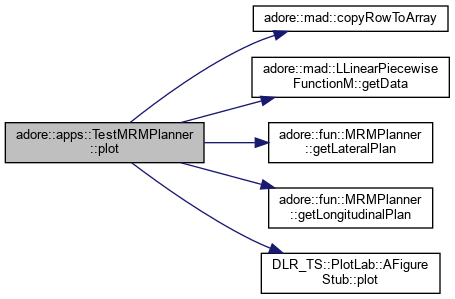
| void | plot () |
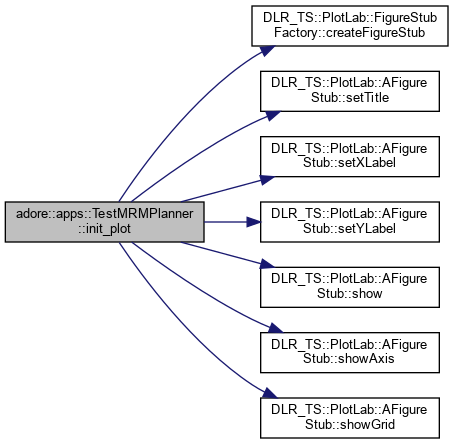
| void | init_plot () |
Private Types | |
| typedef adore::fun::MRMPlanner< 20, 5 > | TPlanner |
test bench implementation for minimum risk maneuver planner
|
private |
|
inline |
|
inline |
|
inline |

|
inline |

|
inline |
update function of the trajectory planner

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
reference for lateral position: follow the middle of the lane
|
private |
post-processing constraint for longitudinal plan
|
private |
|
private |
constraint for deviation from road direction
|
private |
constraint for deviation from road direction
|
private |
curvature compensation
|
private |
lateral jerk compensation
|
private |
lateral position bounds governed by lane boundaries
|
private |
lateral position bounds governed by lane boundaries
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |