|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
a vehicle model which can be used in simulations More...
#include <vehiclemodel.h>
Public Member Functions | |
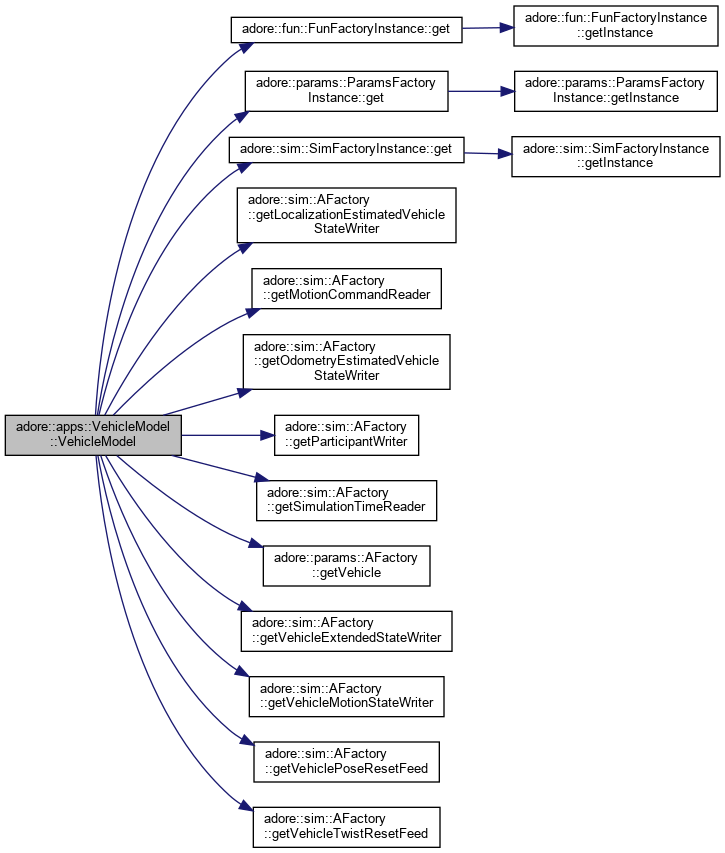
| VehicleModel (bool external_ego_measurement_models, adore::env::traffic::Participant::TTrackingID simulationID, adore::env::traffic::Participant::TV2XStationID v2xStationID) | |
| Construct a new Vehicle Model object. More... | |
| void | setAutomaticControl (bool value) |
| switches between manual and automatic control input More... | |
| void | setCheckpointClearance () |
| confirmation of current checkout More... | |
| void | setSupressInput (bool value) |
| supress input to introduce errors, without deactivating automatic control More... | |
| bool | setIndicatorRightOn (double duration) |
| bool | setIndicatorLeftOn (double duration) |
| virtual void | run () |
| simulation step of the vehicle model More... | |
Protected Attributes | |
| adore::env::traffic::Participant::TTrackingID | simulationID_ |
| adore::env::traffic::Participant::TV2XStationID | v2xStationID_ |
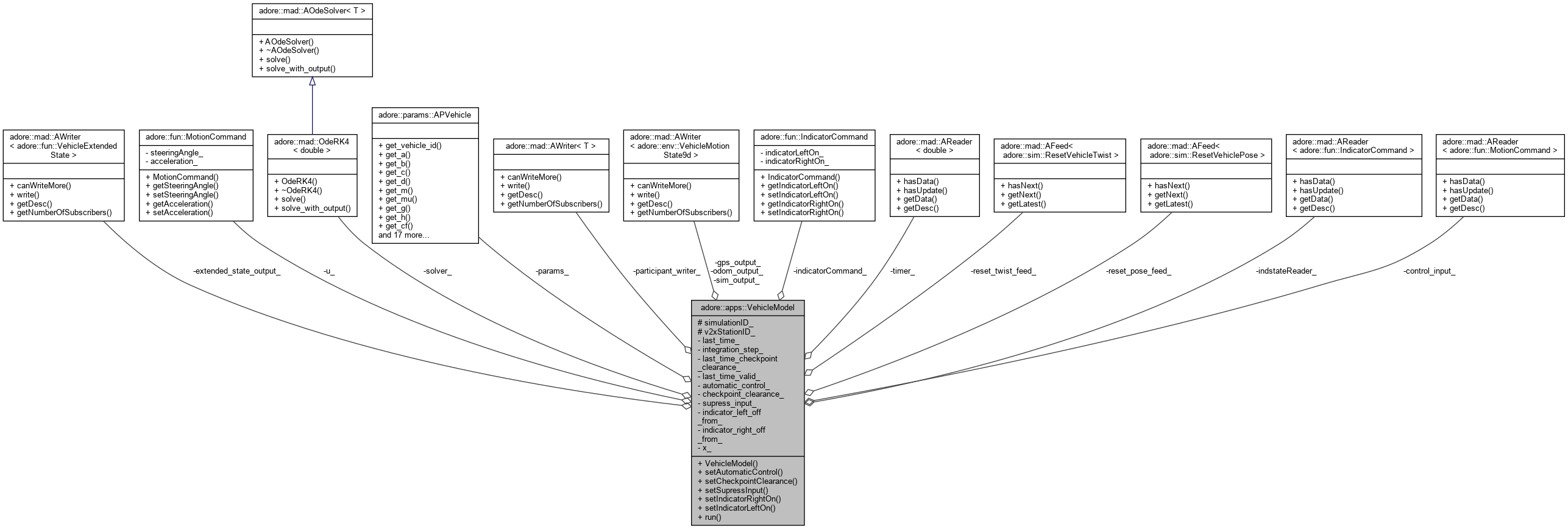
a vehicle model which can be used in simulations
needs a timer, control_input, gps_output from adore::sim listens to reset_pose_feed and reset_twist_feed to reset pose/twist if requested uses run()-function to update
|
inline |
Construct a new Vehicle Model object.
| external_ego_measurement_models | if true, only simulated true vehicle state is published. if false, odom and localization are also published with same data. |
| sim_factory | adore::sim factory |
| paramfactory | adore::params factory |
| simulationID | id of vehicle in simulation |
|
inlinevirtual |
simulation step of the vehicle model

|
inline |
switches between manual and automatic control input

|
inline |
confirmation of current checkout

|
inline |

|
inline |

|
inline |
supress input to introduce errors, without deactivating automatic control

|
private |
|
private |
|
private |
|
private |
< publishes ego state measurement inside vehicle
|
private |
< publishes ego state measurement inside vehicle
|
private |
|
private |
< upper time bound for setting left indicator on
|
private |
|
private |
< publishes extended state values inside vehicle reads indicator commands
|
private |
|
private |
|
private |
|
private |
|
private |
< publishes ego state measurement inside vehicle
|
private |
|
private |
|
private |
|
private |
|
private |
|
protected |
< publishes vehicle state globally
|
private |
|
private |
|
private |
|
private |
|
protected |
|
private |
< upper time bound for setting right indicator on