|
| | CancelLCMRMPlanner (adore::view::ALaneChangeView *lcv, adore::params::APLateralPlanner *plat, adore::params::APTacticalPlanner *ptac, adore::params::APVehicle *pveh, adore::params::APTrajectoryGeneration *ptrajectory) |
| |
| void | addConstraint (ANominalConstraint *constraint) |
| |
| void | addReference (ANominalReference *reference) |
| |
| void | setJMax (double value) |
| |
| void | setTStall (double value) |
| |
| void | setAStall (double value) |
| |
| void | setAMin (double value) |
| |
| void | setSecondAttempt (bool value) |
| |
| | MRMPlanner (adore::view::ALane *lfv, adore::params::APLateralPlanner *aplat, adore::params::APVehicle *apvehicle, adore::params::APTrajectoryGeneration *aptrajectory) |
| |
| TPostProcessConstraints::TInformationSet & | getInformationSet () |
| |
| double | amin_medium_brake_trapezoidal (double v0, double a0, double jmin) const |
| | minimum acceleration that can be achieved before inverting jerk to end with v=0 and a=0 More...
|
| |
| void | t_short_brake_trapezoidal (double v0, double a0, double jmin, double t3) |
| | times required for ramp up during short brake More...
|
| |
| void | t_medium_brake_trapezoidal (double v0, double a0, double jmin, double &t1, double &t3) const |
| | times required for ramp down and ramp up during medium brake More...
|
| |
| void | t_long_brake_trapezoidal (double v0, double a0, double amin, double jmin, double &t1, double &t2, double &t3) const |
| | times required for ramp down, constant and ramp up during long brake More...
|
| |
| int | brake_case_trapezoidal (double v0, double a0, double amin, double jmin) const |
| |
| void | brake_params_trapezoidal (double v0, double a0, double amin, double jmin, double &a1, double &t1, double &t2, double &t3) |
| | general parameters More...
|
| |
| double | a_brake_trapezoidal (double t, double a0, double a1, double jmin, double t1, double t2, double t3) |
| |
| double | j_brake_trapezoidal (double t, double jmin, double t1, double t2, double t3) |
| |
| virtual void | compute (const VehicleMotionState9d &initial_state) |
| |
| TPartialPlan & | getLongitudinalPlan () |
| |
| TPartialPlan & | getLateralPlan () |
| |
| LateralPlanner< K, P > & | getOffsetSolver () |
| |
| virtual bool | hasValidPlan () const |
| |
| virtual const SetPointRequest * | getSetPointRequest () const |
| |
| virtual double | getCPUTime () const |
| |
template<int K, int P>
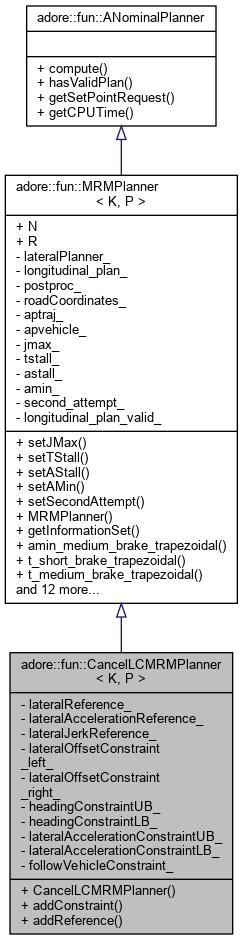
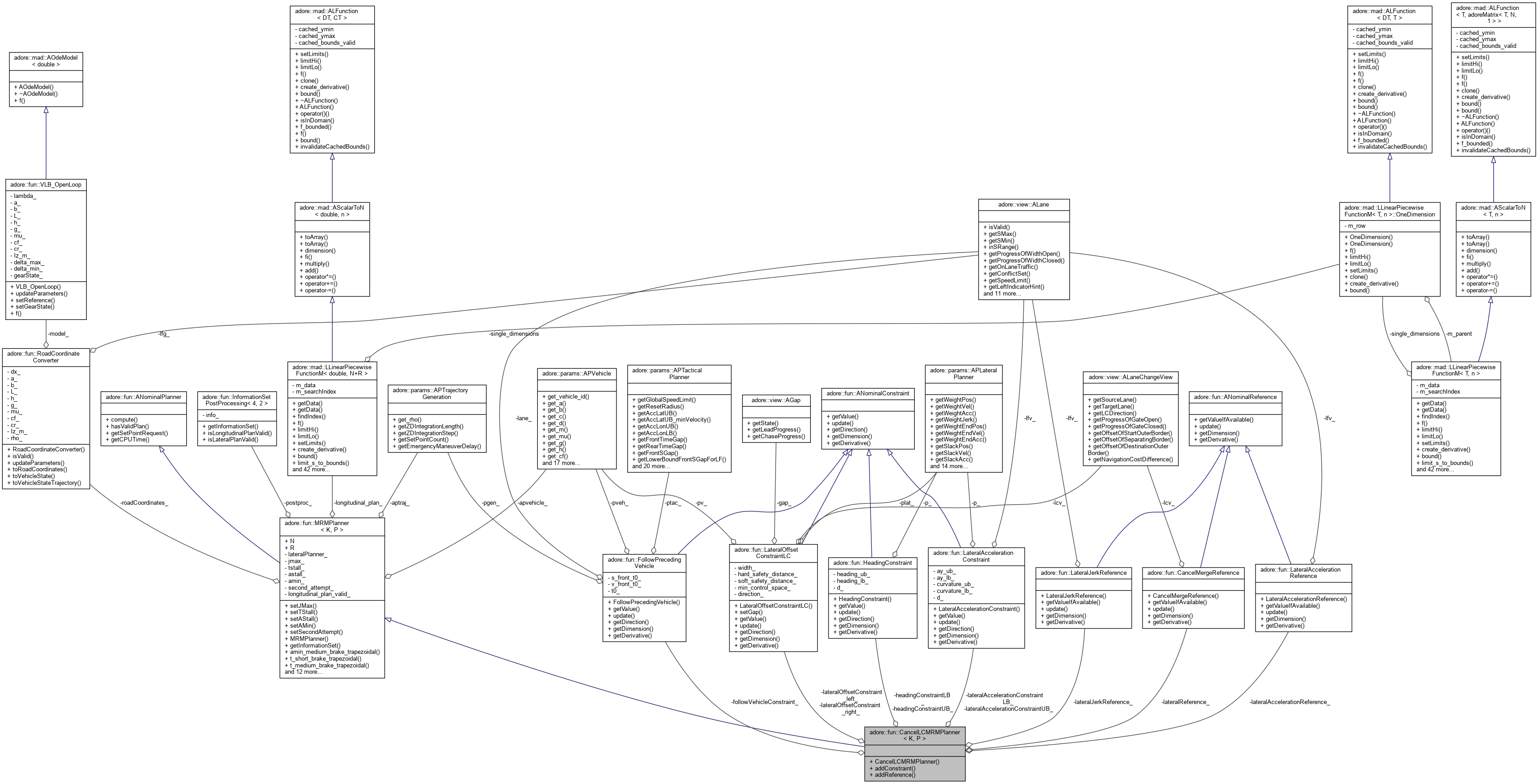
class adore::fun::CancelLCMRMPlanner< K, P >
Plans minimum risk maneuver to cancel lane change.


 Public Member Functions inherited from adore::fun::MRMPlanner< K, P >
Public Member Functions inherited from adore::fun::MRMPlanner< K, P >