|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <basiclanechangeplanner.h>
Additional Inherited Members | |
 Public Types inherited from adore::fun::DecoupledLFLCPlanner< K, P > Public Types inherited from adore::fun::DecoupledLFLCPlanner< K, P > | |
| typedef adore::mad::LQ_OC_single_shooting< N, R, K, P > | TProgressSolver |
| typedef adore::mad::LQ_OC_single_shooting< N, R, K, P > | TOffsetSolver |
| typedef NominalPlannerInformationSet< N+1, 2 > | TInformationSet |
| Static Public Attributes inherited from adore::fun::DecoupledLFLCPlanner< K, P > | |
| static const int | N = 3 |
| static const int | R = 1 |
| Protected Attributes inherited from adore::fun::DecoupledLFLCPlanner< K, P > | |
| TInformationSet | info_ |
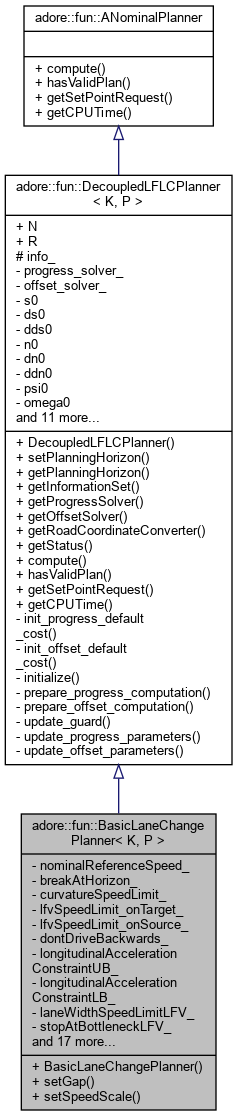
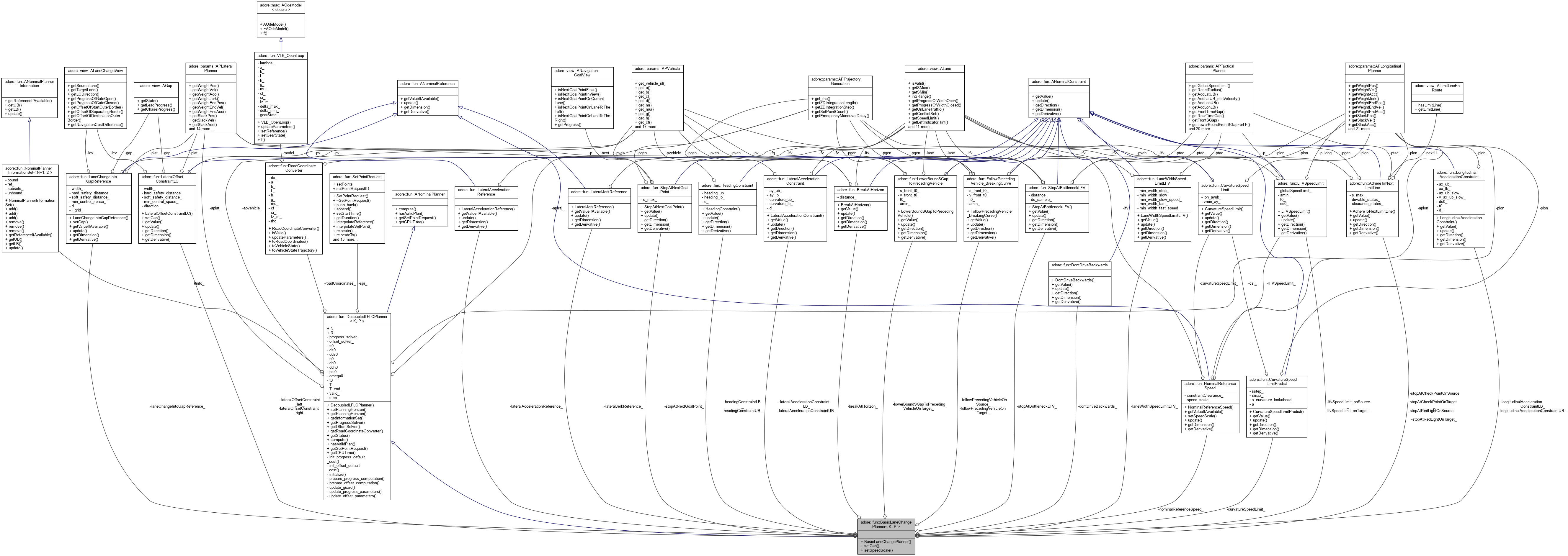
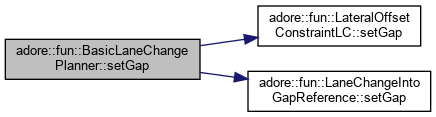
Plans lane change maneuvers. The maneuver is limited in that front vehicle may not be overtaken during maneuver. Specialization of DecoupledLFLCPlanner for lane change maneuver planning.
|
inline |
reference for vehicle lateral position Constructor. Initializes references and constraints by linking them to required data abstraction views and parameters.
| lcv | view for lane changing (determines direction of lane change, as well as source and target lane) |
| plon | longitudinal planning paramters |
| plat | lateral planning parameters |
| pveh | vehicle parameters |
| ptrajectory | trajectory generation parameters |

|
inline |

|
inline |
setSpeedScale - define reference speed to be a certain percentage of the


|
private |
plan to reduce speed to standstill inside visible range
|
private |
do not exceed lateral acceleration constraints in curve
|
private |
only drive forwards
|
private |
constraint enforcing vehicle to follow next vehicle on source lane
|
private |
constraint enforcing vehicle to follow next vehicle on target lane
|
private |
constraint for yaw angle deviation from road direction
|
private |
constraint for yaw angle deviation from road direction
|
private |
|
private |
constraint enforcing slow movement through narrow gaps
|
private |
constraint for ay
|
private |
constraint for ay
|
private |
curvature supression
|
private |
jerk supression
|
private |
constraint for staying in lane boundaries, which are selected according to gap state
|
private |
constraint for staying in lane boundaries, which are selected according to gap state
|
private |
speed limit
|
private |
speed limit
|
private |
constraint for ax
|
private |
constraint for ax
|
private |
|
private |
speed reference
|
private |
@TODO: rework this for lcv, constraint enforcing vehicle to stop, if road is too narrow
|
private |
constraint enforcing vehicle to stop at next checkpoint_on_source
|
private |
constraint enforcing vehicle to stop at next checkpoint_on_target
|
private |
constraint enforcing vehicle to stop, if goal point is reached
|
private |
constraint enforcing vehicle to stop at next controlled connection, if it is switched to red
|
private |
constraint enforcing vehicle to stop at next controlled connection, if it is switched to red